Think you might need a robotic positioner? Which one is best for you?
There is a huge selection of positioners available, with varying axes, payloads, and configurations. How do you tell which positioner will suit the needs of your application?
Here’s an overview of robotic positioners — what they are and what you need to know.
It’s hard enough to pick the right industrial robot for your application. You probably looked at dozens of different robot models before you found the best one for your needs, looking at the best reach for a robot, the best payload, the best brand.
Just when you thought all of your decisions were over and you could get started automating your process, a new decision arrives: Do I need a robotic positioner?
If you are working with an experienced robot integrator, your temptation might be to let them decide for you. Their expertise will certainly be important for helping you to make the right choice. However, it’s still a good idea for you to become familiar with the ins and outs of robotic positioners yourself.
When used correctly, positioners can improve the capabilities of a robotic arm quite significantly. With even just a little bit of knowledge, you can ensure that you’re getting the most from your robot application.
This article provides an overall guide to robot positioners, giving you just enough information to make an informed decision.
What Is a Robotic Positioner?
A robotic positioner (aka workpiece positioner) is a programmable mechanism with one or more axes that works in unison with an industrial robot to expand the robot’s capabilities. The workpiece is mounted onto the robotic positioner and can be controlled independently of the robot, improving its flexibility.
Workpiece positioners come in many different sizes, types, and configurations. They range from the simplest, single-axis turntable to the most complex customized combinations of multiple programmable axes.
The basic purpose of a workpiece positioner is to expand the workspace of the robot. This makes them similar to other auxiliary axes where the robot itself is mounted onto a linear track, curved track, or gantry crane. However, unlike these auxiliary axes, the workpiece itself is the part that moves, not the robot. For a guide to using offline programming with any auxiliary axis, see our previous article.
Is Your Application Right for a Robotic Positioner?
The first thing you want to determine when you are considering a positioner is whether your application is suitable. Many robot applications do not need extra degrees of freedom (DoF) and can be achieved with the robot alone.
A good place to start thinking about this is to ask: “Am I currently being restricted in this application by the workspace of the robot?”
If so, it’s worth looking into whether a positioner (or another auxiliary axis) might be good for you.
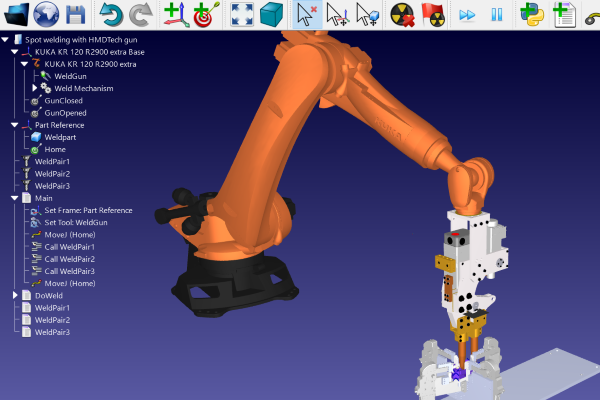
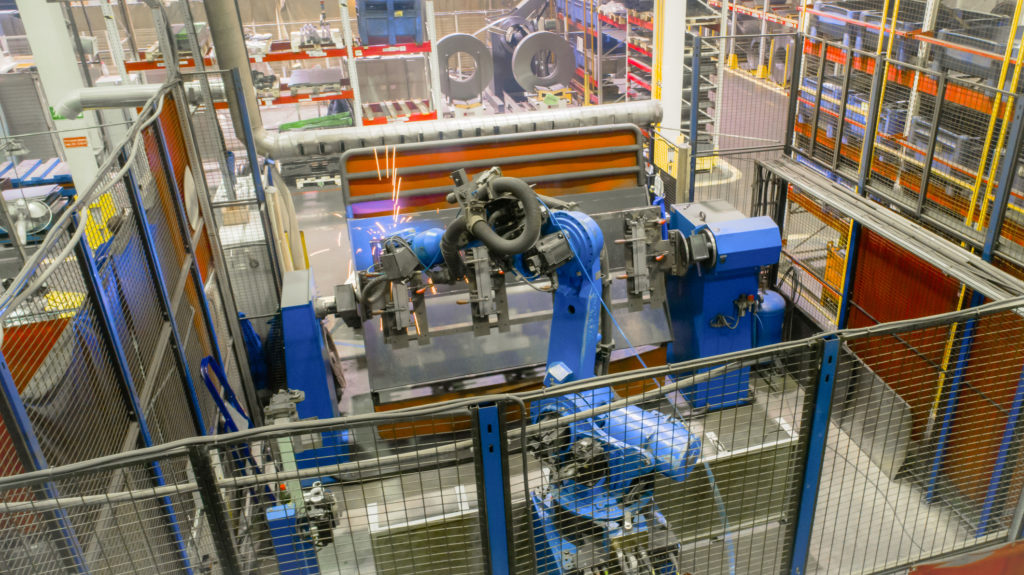
Probably the most common applications where positioners are routinely used are robotic welding and robotic machining. In these tasks, all 6 DoF of the robot itself are being used to precisely position the tool. There is not much leeway for approaching the workpiece from a different orientation. As a result, a positioner is often necessary when welding or machining parts with more complex geometries.
Other common tasks include painting, coating, and inspection.
3 Less-Obvious Benefits of Using a Robotic Positioner
Extending the workspace of the robot is certainly a compelling reason to choose a positioner. However, there are also other benefits that are slightly less obvious:
- Concurrent processes — Some positioners allow for multiple workpieces to be mounted on opposite sides. This allows for two or more operations to be performed simultaneously with multiple robots, as in this example from ABB.
- Smaller footprint — Though counterintuitive, a positioner can actually reduce the amount of floor space that a robot cell uses compared to, say, using another type of auxiliary axis with the workpieces laid out on benches.
- High load capacity — Some positioners can handle huge, heavy workpieces. Whatever your task, there is likely to be positioner that can handle the load.
5 Common Types of Robotic Positioner
There are many types of robotic positioner but here are the most common:
1. Turntables
The most basic type of positioner, turntables sit on the floor or workbench and rotate the workpiece around one axis only (the vertical axis). They are commonly used in robot milling, as we saw in the Protolab project with RoboDK (the turntable is not seen moving in this video).
2. Single-Axis Positioner
A turntable is just a specific type of single-axis rotational positioner. But, single-axis positioners exist for almost any orientation. The most common rotate the workpiece around the horizontal axis in a similar manner to a lathe.
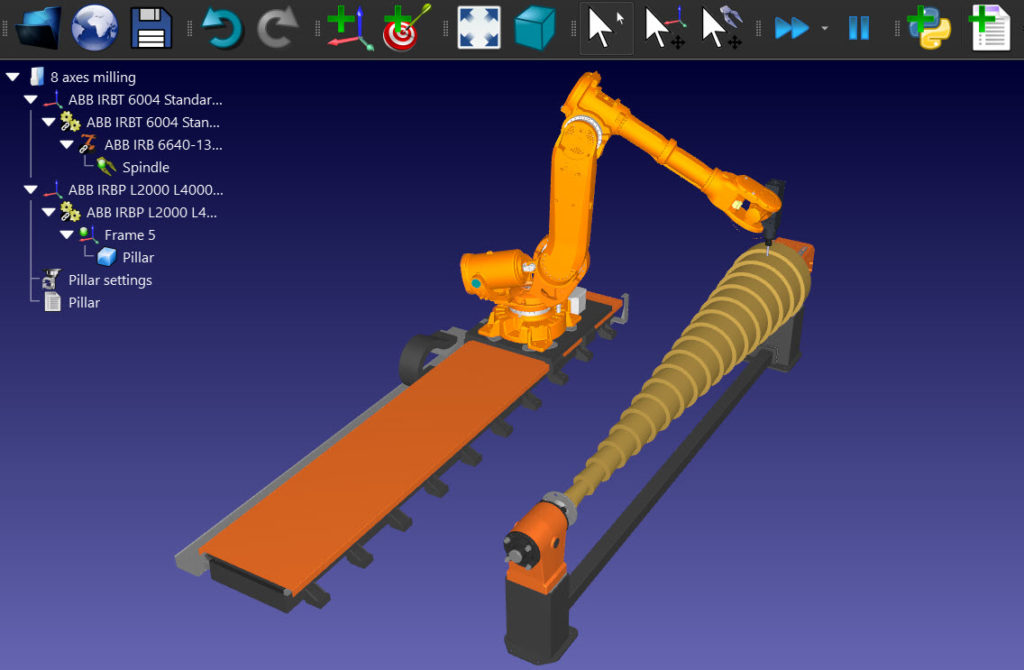
3. Headstock and Tailstock
If your workpiece is too long or too heavy for a single positioner, a common approach is to combine two single-axis positioners, with one affixed at each end of the workpiece (known as headstock and tailstock). The control is synchronized so they as easy to program as a single positioner.
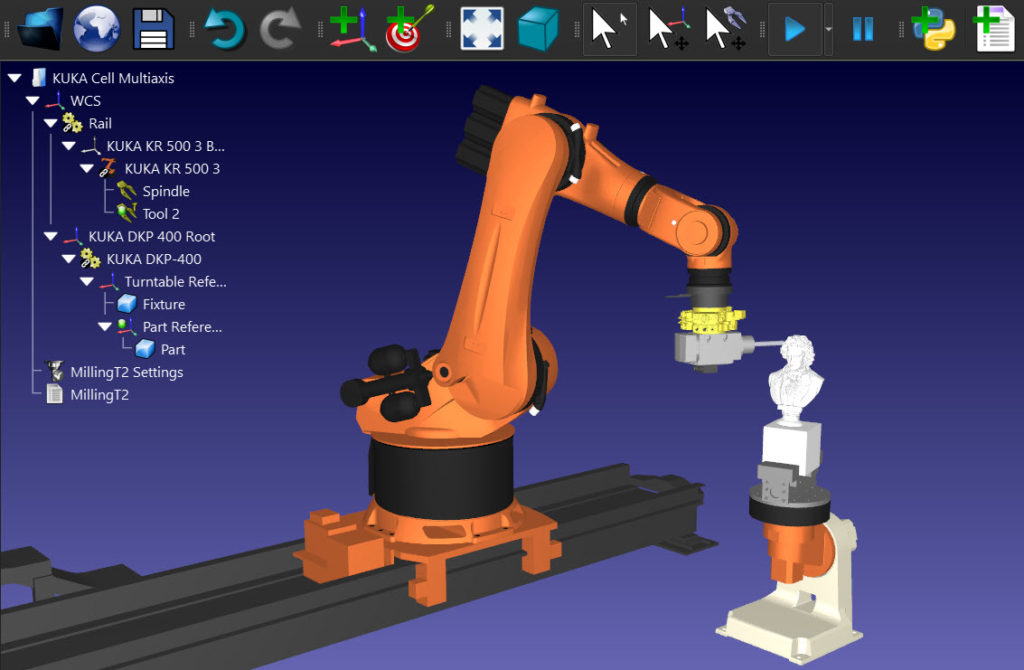
4. Multi-axis positioners
This is where it gets complex. You can find positioners in almost any configuration and orientation. The simplest combine two programmable axes on the same positioner, the most complex can be customized with almost as many axes as you want.
5. 3-Axis (Ferris Wheel) Positioners
A very common type of multi-axis positioner is the “ferris wheel.” This includes 3 programmable axes that work independently. To operate correctly, they need to be balanced by having the same weight on both sides, which usually means two of the same type of workpiece.
How to Pick the Best Robotic Positioner for You
The best positioner for you will depend on the needs of your application.
You will want to consider questions like:
- How much space do we have to fit the robot and positioner?
- What is the geometry of our workpieces?
- Are the workpieces too large or heavy for a single positioner?
- What style of positioner makes the most sense?
- What payload does the positioner require?
Once you have determined the best type of positioner, have a look at the various manufacturers of robotic positioners to find a suitable model.
RoboDK already includes many positioners from ABB and KUKA in our Robot Library. However, there are more providers of positioners which we will happily integrate into RoboDK on request.
You can also create your own positionners and synchronize them with your robot. With RoboDK software you can also optimize the motion of your external axes according to your preferred settings.
What task do you think would benefit from a robotic positioner? Tell us in the comments below or join the discussion on LinkedIn, Twitter, Facebook, Instagram, or in the RoboDK Forum.