Learning robotics should be accessible, affordable, and easy to access. That’s what we believe here at RoboDK. And it’s why we created a comprehensive collection of free tutorials on our YouTube channel to help you master robotic simulation and programming.
Whether you are a beginner exploring the basics of robotics or an experienced expert looking to refine your skills, these tutorials will help you get to where you need to go as efficiently as possible.
Here are 7 of the most popular robot tutorials ever on the RoboDK YouTube Channel:
1. Master Python Offline Programming
Python is one of the top choices of programming language in robotics, thanks to its flexibility and ease of use.
This popular tutorial shows you how to create, simulate, and optimize robot programs using RoboDK’s powerful Python API.

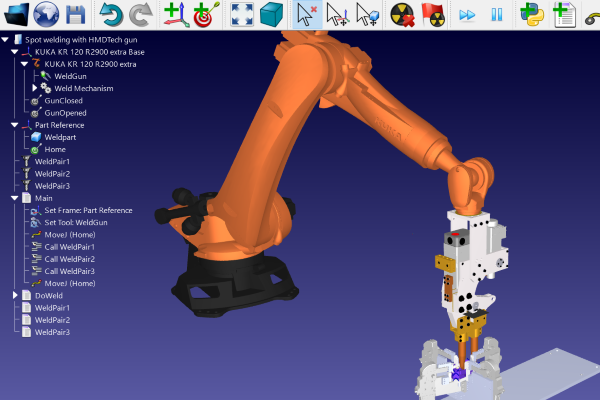
In this tutorial, you will learn how to program a hexagonal welding path for a simulated KUKA robot in RoboDK. Using custom Python code, it shows how to create the welding path using joint move (MoveJ) commands with respect to a particular target.
It also guides you through the process of generating the robot program to send to the KUKA controller
2. The Beginner’s Guide to Setting Up Your First Robotic Cell
One of our most watched videos, this beginner tutorial breaks down everything you need to begin using RoboDK.
In this tutorial, you learn how to install RoboDK and familiarize yourself with the interface. You’ll learn shortcuts for smoother navigation, the steps to create a simple robot cell, and tips for managing reference frames and targets.
If you haven’t yet downloaded RoboDK yet, this is the tutorial you should watch first. With practical steps, it guides you all the way from downloading the software through to being ready to create your first operational simulation.
3. Build Your First Robotics Project from Scratch with Ease
Another beginner tutorial, this popular tutorial helps you create your first robot project from scratch. By the end, you will have created a simple robotic application.
In this tutorial, you will learn how to find your chosen robot model from our extensive Robot Library and find exactly the right robot for your needs. You’ll also learn how to work with reference frames, a key concept in any RoboDK programming workflow.
For a quick, simple guide to setting up a new project, this is the perfect tutorial.
4. Create an Efficient Robotic Pick and Place System
As pick and place is one of the foundational robot applications, it’s no surprise that this pick and place webinar is so popular.
This is not just a recorded video tutorial but a full recording of a live webinar. In it, we deep dive into everything you need to know to set up a pick and place application in RoboDK.
In this webinar recording, you’ll learn how to create pick and place targets, configure robot motions, and optimize trajectories to improve simulation efficiency. By the end, you will have everything you need to know to create a functional robot cell for a pick and place application.
5. Synchronize Multi-Robot Systems for a Perfect Conveyor Workflow
Have you ever wondered how to simulate a fully synchronized multi-robot system?
This popular tutorial shows how to set up a conveyor application with two collaborating robots.

Multi-robot systems are a powerful option for adding agility to your automation… But they can also be challenging to program if you don’t have the right knowledge.
In this tutorial, you’ll learn how to use Python scripts to easily manage multi-robot setups in just 20 minutes. It shows how to detect objects on a simulated conveyor, attach them to the robot grippers, and execute synchronized movements between two robots.
6. Import and Customize 3D Models and Tools for Seamless Simulations
One of RoboDK’s great strengths is its wide support for your custom components. If you have a 3D object file, you can import it and use it in your simulation.
This popular tutorial is your go-to resource for learning how to import 3D models into RoboDK and customize robot tools. With support for STEP, IGES, STL files, and more, you’ll learn how to incorporate these objects seamlessly into your project.
The video guides you through the practical steps for building functional robotic cells from custom object files, from attaching reference frames to creating a custom tool (in this case, a paint gun).
7. Transform CNC Operations with Cutting-Edge Robot Milling
With the rise of robot machining, applications like robot milling are becoming a powerful addition to manufacturing processes.
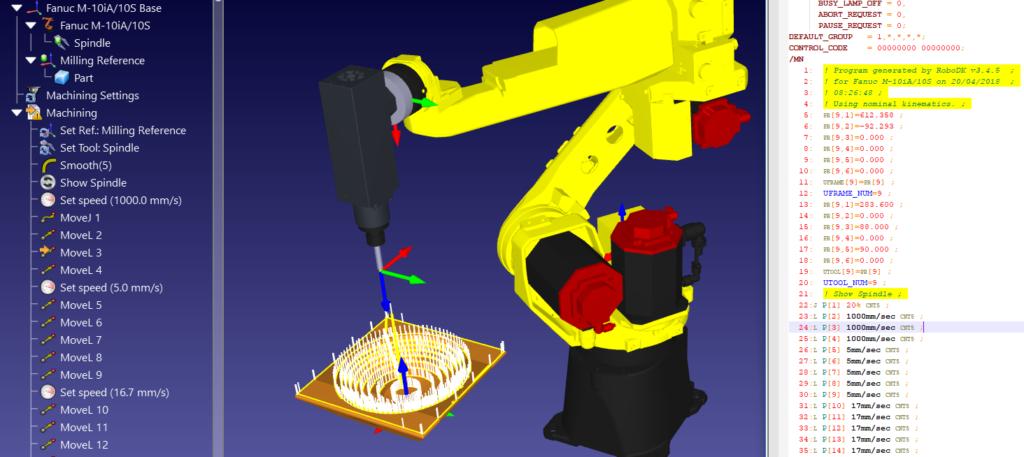
In this practical tutorial, you’ll learn how to convert CNC programs into robot milling paths using RoboDK. It guides you through the process of importing your CAM file, setting up your station, improving the milling path, and generating the robot program.
The video also explains steps for 3-axis and 5-axis milling, as well as how to simulate multiple robots in the same station.

Unlock Your Robotic Potential with Our Tutorials and Training Resources
The RoboDK YouTube Channel contains a wealth of free resources for you to learn everything you want to know about robotics.
If you want to keep up to date with all our new videos, make sure to subscribe to the YouTube channel!
If you don’t see answers to your specific questions, a great place to start is looking in the RoboDK Documentation Page.
From there, the next stop should be the RoboDK Forum where our community and experts from the RoboDK team are there to help you out.
What new tutorial would you like to see on the YouTube Channel? Tell us in the comments below or join the discussion on LinkedIn, Twitter, Facebook, Instagram, or in the RoboDK Forum.. Also, check out our extensive video collection and subscribe to the RoboDK YouTube Channel