进入21世纪末,是什么定义了“机器人”?看下定义现代工业机器人的关键特征,以便您在比较自动化项目方案时有所参考。
过去70年间,机器人已发生巨大变化。自首批工业机器人进入汽车行业以来,相关技术逐步发展。随着人工智能(AI)的进步,机器人的定义也在不断演变。
然而,从一开始,工业机器人的核心特征就保持得相当稳定。
以下是您在比较机器人模型时需要了解的10个关键特征:
1. 自由度(DoF)
自由度(DoF)可能是所有机器人特性中最基本的一项。它指的是机器人机构能够移动的独立轴数量。
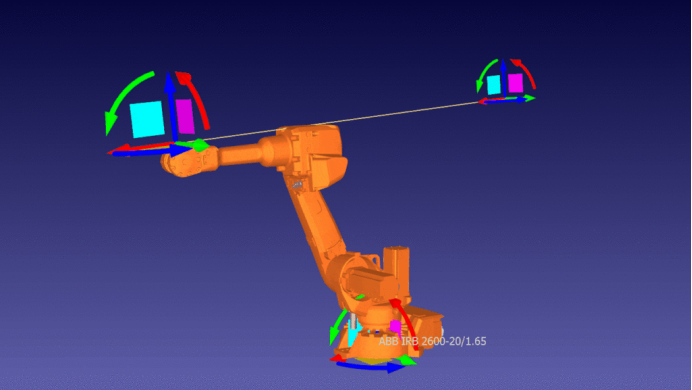
一台标准的6自由度机械臂可在六个维度上独立移动其末端执行器的位置:
- 3个平移运动(X、Y、Z方向)
- 3个旋转运动(分别绕X、Y、Z轴旋转)
尽管6自由度机械臂较为常见,但部分机器人(如SCARA机器人)的自由度更少。还有一些机器人具有额外自由度,这有助于避开障碍物或机器人奇异点。
2. 负载能力
机器人的负载是指它能承载的最大重量,包括任何工具和末端执行器。
当您设计一个新的机器人应用时,负载能力是比较不同型号的开始。制造商总会列出机器人的有效载荷,因此这是一种快速缩小潜在型号范围的简便方法。
您可以使用我们的机器人比较工具,来查看所有具有相同负载能力的机器人型号。
3. 重复性与精度
在比较机器人型号时,重复性和准确性应排在首位。
这些术语的含义如下:
- 重复性是指机械臂能够一次又一次地回到同一位置的准确度。机器人制造商通常会列出重复性指标。
- 精度是指机器人到达正确位置的接近程度。制造商通常不会列出机器人的精度,因为它会因校准或编程的不同而有所变化。
您可以在编程过程中对机器人进行正确校准,从而提高其精度。
4. 延伸距离(Reach)与工作空间(Workspace)
延伸距离(Reach)是衡量机器人从其基座能够伸展多远的度量。这是机器人数据手册上列出的一个常见特性,它能让你对可用于任务的工作空间有一个大致的了解。
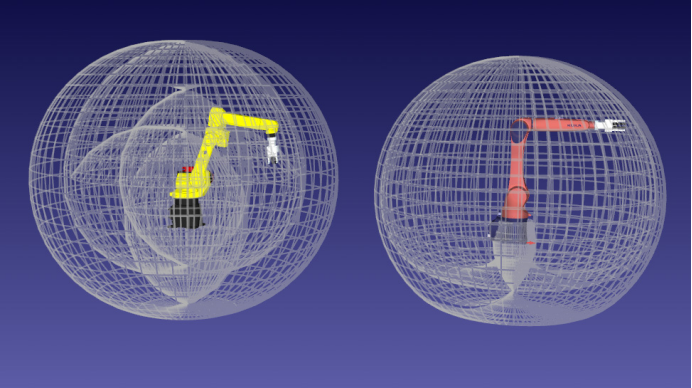
另一个相关的特性是工作空间(Workspace),它显示了机器人所能覆盖的空间的完整体积。例如,一个6自由度(DoF)的协作机器人可能拥有一个球形工作空间,而一个SCARA机器人则可能拥有圆柱形工作空间。
可达性分析(Reachability analysis)和工作空间可视化(workspace visualization)是用于查看机器人完整工作空间的有用技术。
5. 速度与循环时间
考虑机器人的速度有多种方式。
两种常见特性如下:
- 关节速度—决定每个关节的移动速度。
- 末端执行器速度—决定末端执行器沿机器人某一自由度(DoF)在空间中的移动速度。
然而,速度并非仅关乎机器人能移动多快。通常更有意义的思考角度是:机器人完成特定任务的快慢。
循环时间是衡量机器人完成特定任务单次循环所需时间的有效指标。你可以在机器人模拟器中测量任务对应的周期时间。
6. 末端执行器兼容性
机器人的实用性取决于其工具。这被称为末端执行器,有数百种可能性,包括夹爪、焊机、喷漆枪、传感器等等。
检查您的机器人是否与您可能想使用的任何末端执行器兼容,这一点非常重要。
使用RoboDK,您可以在模拟器中快速模拟不同的工具,甚至可以自动校准工具中心点,以实现更精确的操作。请查看我们关于在RoboDK中创建工具的终极指南。
7. 安装选项
工业机器人并非必须安装在地面或桌面上。通常,将机器人安装在天花板或墙壁上能更有效地利用空间。
对于某些机器人型号,您需要选择兼容天花板安装的特定版本。这一点您应向制造商确认。
将机器人安装在附加轴上,也是扩大机器人系统工作空间的有效方法。
8. 机器人控制与软件
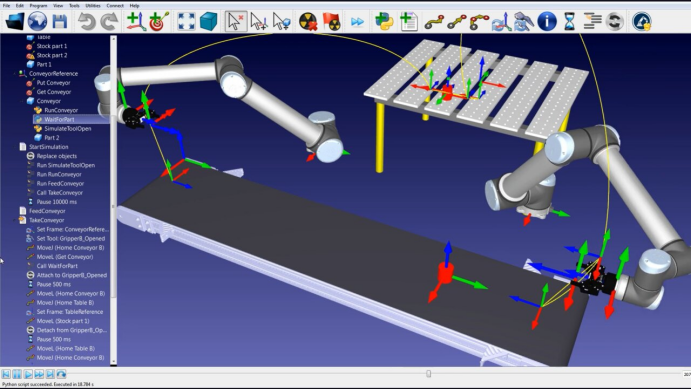
机器人的编程与控制方式与其硬件本身同等重要。
借助RoboDK的厂商中立编程软件,您可以快速轻松地为众多制造商的大量机器人型号编写程序。
无论您选择何种机器人品牌,离线编程与仿真都能减少机器人编程领域诸多历史遗留障碍。
9. 安全与协作
在过去的20年里,随着协作机器人(cobot)的兴起,安全性已成为许多公司的关键特性。
协作机器人被设计为能在人类工人周围安全运行。通过力感应、符合人体工程学的硬件设计和严格的速度限制,它们为人机协作任务创造了可能。
机器人安全遵循诸如ISO 10218-1和ISO/TS 15066等国际标准。借助像RoboDK这样的工具,你可以在虚拟环境中模拟安全区域并测试程序,从而在机器人与人并肩投入生产之前降低风险。
10. 成本与投资回报率
过去几十年间,机器人价格大幅下降,使这项技术得以惠及更多人群。
即便如此,计算机器人系统的投资回报率仍十分重要。这需考量总拥有成本、安装、集成、编程成本、停机时间及培训等多重因素。
这也正是仿真与规划至关重要的原因。若在安装前,通过RoboDK这类仿真器完成工作站设计、程序测试和动作优化,便能降低财务风险,更快实现投资回报。
为何特性至关重要:这是一门新语言
如果您从未使用过机器人,所有这些术语可能会让您感觉像在学习一门新语言。
机器人的特性不仅仅是数据表上的规格参数。它们定义了您的机器人能做什么—以及它能做得有多好。
当您理解了自由度(DoF)、重复定位精度、负载能力和工作空间等关键特性后,就能确保为您的需求选到合适的机器人。
借助RoboDK,您可以在实物投入工厂生产之前,探索真实的机器人模型、模拟真实世界的任务并做出明智的决策。