
为什么机器人制造可以帮助你渡过危机
2020年的开始,世界就发生了巨变,全球瘟疫间接地翻转了我们的生活。不过,“乌云背后总有阳光”,机器人行业则被预期会在危机过后更快速地发展。
继续阅读工业机器人应用从未如此简单
2020年的开始,世界就发生了巨变,全球瘟疫间接地翻转了我们的生活。不过,“乌云背后总有阳光”,机器人行业则被预期会在危机过后更快速地发展。
继续阅读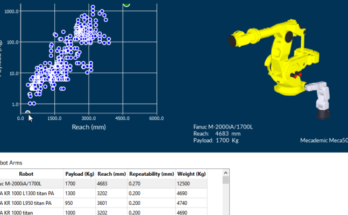
一台机器人的“工作范围”会对应用中的很多其他参数产生影响,比如工件的尺寸和对外部轴的需求等等。你知道对你而言最适合的机器人工作范围是多大吗?
继续阅读
制造业公司的未来依靠于其对数据的处理能力。换言之,假若你不能很好地收集和分析你的数据,就可能会被行业淘汰。有人称数据为制造业未来的脉搏,假如在业内又能结合机器人的运用,更能锦上添花。
继续阅读
“机器人提供的创新技术正为视觉艺术界带来革命。”——这个月,“不开灯肖像馆”正在伦敦的本·布朗画廊展示没有手工参与的肖像画制作。
继续阅读
有人说,现在到处都是机器人呢!真的是这样吗?有些行业受工业机器人的影响明显比其他产业的要深远。你所在的行业又是怎样的情况呢?
继续阅读
检测是一项单调且“吃力不讨好”的任务,所以,我们需要一个完美的机器人解决方案来完成它! 可想而知,在铁路工程中,检测可不是件容易的事情……除非你正在使用RoboDK!
继续阅读
是时候为你的未来充电了!因为未来取决于现在。下面我们为你准备了10个让你能在2020年机器人行业中获得成功的核心机器人技能。
继续阅读
我们现在支持树莓派了!等等,你不知道树莓派?你使用过他们的产品吗?树莓派对机器人编程来说真的是一个好工具吗?让我们一起来看看吧。
继续阅读
一直以来,手机上可选择的离线编程工具几乎少之又少。不过,现在不同了!有了最新版本的RoboDK,你就可以使用移动设备,在任何地方完成机器人编程工作了。
继续阅读
现在,对于制造产业来说,时代将带来更多的挑战。
继续阅读
在工业机器人应用中,使用机器人代替人力取放物件是最常见的任务类型之一,这类型的自动化任务经常需要使用到传送带。而给机器人编程时,传送带的动态变量给编程与仿真带来复杂性,因此机器人传送带的仿真往往很有挑战性。今天,我们给出一些建议来帮助用户实现这一任务。
继续阅读
我们提到过,工业机器人可以帮助用户完成多种生产加工工艺。今天我们就介绍一下由来自芬兰的工程师们制作的机器人磨边工序,用于对冰上曲棍球棒的加工。我们从来都不知道,原来曲棍球棒有这么复杂的加工过程!
继续阅读
使用“高阶”语言给工业机器人编程有很多好处。那么,哪种语言更适合于机器人编程呢——是 Python, C# 还是 MATLAB?
继续阅读
工业机器人可以通过多种办法实现编程,如何在各个选项中找到最好的办法?这里是我们提供的“傻瓜”指南。
继续阅读
对很多焊接生产商来说,训练焊接技术工人可能是一个发展瓶颈。正如我们在上一篇文章中提到的,焊接工人短缺是行业内的一大问题,而机器人焊接可以减缓企业的这一压力。那么,如何能够迅速实现机器人焊接技术的培训呢?今天,我们给出几条减少培训时间的建议与提示。
继续阅读