避免机器人奇异点是控制工业机器人的基础。对机器人程序员和用户而言奇异点可能是一个十分严重的问题,对生产力和质量会产生真正的影响。
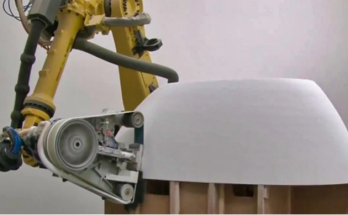
当机器人的控制算法因运动学奇异性而“崩溃”时,可能会导致机器人以不可预测甚至危险的方式运动。例如,如果一个绘画机器人在经过奇点附近时意外地改变了速度,将会影响绘画工作的质量。
幸运的是,在工业机器人编程中,有各种策略可以避免奇点带来的负面影响。
以下是9种策略可确保机器人的动作安全且可预测:
1.添加偏移量
第一种避免奇异点的策略非常简单。机器人技术人员已经使用它几十年了。你只需在编程时向机器人的工具添加一个偏移即可。
当机器人的两个轴以特定的方式排列时,通常会出现奇点。例如,当“关节4”和“关节6”重合时,会发生腕部奇点。通过在机器人的工具上添加一个小角度,可以降低轴对齐的可能性。然而,由于增加了偏移量,这种策略也可能带来不准确或复杂的情况。
2.停止机器人
避免机器人奇异点的一种快捷方法是在机器人接近奇异点时对其进行停止编程。这至少可以避免任何可能损害机器人的动作或行为。
你可以通过多种方式应用此策略。例如,你可以在机器人的程序中添加一个“停止点”或“危险区域”。当机器人进入这个区域,它会触发停止状态。
这个解决方案存在一些弊端: 例如,它不够优雅,可能会让那些不自己编写机器人程序的用户感到困惑,因为他们不知道为什么机器人停止了。

3.移动任务
一个更优雅的避免奇异点的解决方案是将机器人的任务移动到其工作区中的另一个区域。你可以定位任务,从而避免遇到任何奇异点。
这个策略要求你对机器人的运动学和可达性有所了解。在机器人的工作空间中找到合适空间的一种方法是进行可达性分析。像RoboDK这样的工具可以极大地帮助实现这一点,它具有可视化机器人工作空间的内置功能。
4.使用cuspidal robots
cuspidal robots是那些专门设计成没有奇点的机器人。它们可以在工作范围内自由移动,且永远不会达到运动学奇点。
cuspidal robots的主要优点是能够以安全稳定的方式平稳地执行复杂的运动。其潜在的问题是,这种类型的机器人有时无法执行简单的动作。由于避免奇异点优先于任务精度,因此创建无奇异点运动的编程技术可能会降低机器人的运动精度。
5.施加关节限制
避免某些奇点的一个简单有效的解决方案是在机器人编程中施加关节限制。这可以防止有问题的关节移动超过特定角度,从而导致机器人进入奇点。
虽然这种方法简单有效,但它限制了机器人的运动。它移除了部分机器人工作空间。然而,对于某些任务来说,这也是可以接受的。

6.学会识别奇点
一个强烈推荐的策略是学会在机器人奇点出现时识别它们。当你知道该注意什么时,你就会为看到奇点时该做什么做好准备,你就会对如何解决问题有更好的想法。
有了经验,你可能会开始对机器人的工作空间及其独特性产生直观的“感觉”。这项技能使你在创建机器人程序时更容易避免奇点。
7.深入了解奇点
认识到奇点之后,下一步就是成为“奇点专家”。这意味着要更多地了解导致奇点的先进数学概念。有了这样的理解,你将有足够的知识来创建能够优雅地检测和避免奇点的机器人程序。
对于大多数机器人用户来说,可能并不需要做到这个程度。奇点背后的数学非常复杂。然而,如果你的目标是成为一名机器人专家,那么发展这一技能不失为一个好主意。
8.增加动态避免奇异性
另一种策略是在机器人的编程中添加动态奇异性避免。即当机器人遇到奇点时,它在运行中调整运动的地方。对于需要物理人机协作的任务而言,这是一种有效的策略,因为机器人会主动避免接触操作员。
实现这种避免奇异点的方法之一是,当机器人太接近奇异点时,给它的运动增加动力。研究人员将该方法成功地应用于机器人手动导引任务中,并取得了良好的效果。

9.使用带有自动奇异性检测的软件
最后,避免机器人奇点的最有效方法之一是使用具有自动奇点检测功能的机器人编程软件。RoboDK内置了奇点检测功能,专门用来告诉你所选择的轨迹是否会穿过奇点
这使得编程变得更容易,因为当你对机器人进行编程时,你不需要担心它是否会进入奇点。
是的,奇点可能很复杂。
但是,通过遵循上面概述的策略,你可以确保你的机器人程序没有任何有问题的奇点。你越能更好地识别运动学奇点,并调整机器人的操作以避免它们,你的机器人的运动就越稳定和高效。