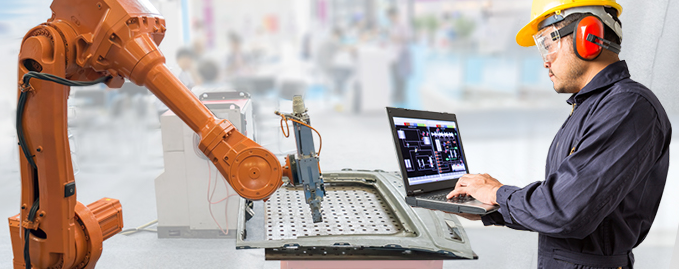
As a robot user, you are faced with a huge array of options for robot programming.
Some options — such as jogging and online programming — may be very familiar to you. They may be slow, cumbersome, and have varying precision. Other options — such as hand-guiding — appear to be more intuitive but their lack of precision is often concerning.
You might be wondering: Is precision an important factor for me to consider when choosing a programming method?
Precision is increasingly relevant in modern robotics. In the past, most robots were not precise enough for detailed tasks. However, robotic technology has improved significantly in recent years. Many robots are now advertised as precision technology.
When it comes to robot programming, precision is not always assured. It can sometimes feel like you’re stuck between two decisions…
If you want easy programming, you can’t have a precision application.
If you want a precision application, you can’t have easy programming.
Is this really true?
How important is precision in robot programming?
Precision Robotics vs Easy Robot Programming
If you think that precision and intuitive programming are at odds with each other, you are not alone.
After all, the classic example of intuitive programming is hand-guiding: This is where you physically move the robot to the location that you want it to move, with your hand. Hand-guiding is easy to use but it is not usually suitable for precision tasks. The robot’s teach pendant is usually necessary when precise movement is required.

Another option for intuitive programming is offline programming. This is where you program the robot using a simulated robot first and later download the program to the physical robot when it is ready. People sometimes believe that offline programming is an imprecise way of programming a robot. However, this is a misconception as we showed in a previous article.
These conceptions of the existing options — some of which are true and some of which aren’t — can lead us to feel that precision can never be possible with an easy programming method.
This is not necessarily true.
Are Precise + Easy Robot Programming Tools Possible?
The problem with most options that are advertised as “easy robot programming” is that they make sacrifices on precision to improve their intuitiveness.
With hand-guiding, for example, it’s very intuitive for you to physically move the robot to the desired location. However, you sacrifice the inherent dexterity of the human hand and arm because you need to drag the robot around its workspace.
With some offline programming options, you sacrifice precision when the simulated robot does not accurately represent the physical robot. This issue can be overcome with good calibration. However, you are still sacrificing ease-of-use because most offline programming tools are not as intuitive as hand-guiding.
What would it take to have an easy robot programming tool that didn’t sacrifice precision?
You would need the tool to:
- Allow the human to use the inherent dexterity of their hand and arm in the programming task.
- Include perfect calibration with the robot (or as close to “perfect” as is possible).
- Be easy to use.

For this, we need to look at a new way of programming robots…
One that has the ease of hand-guiding but with the highest precision possible…
We need to look at the world of laser trackers…
A New Way to Program Robots Without Sacrificing Precision
Now there is a new way to easily program your robot without sacrificing precision.
With this new approach, you create a robot program simply by tracing the motions of the robot with your hand whilst holding a laser tracker probe.
This method provides the benefits of an easy-to-use robot programming method with the added precision of laser tracking.
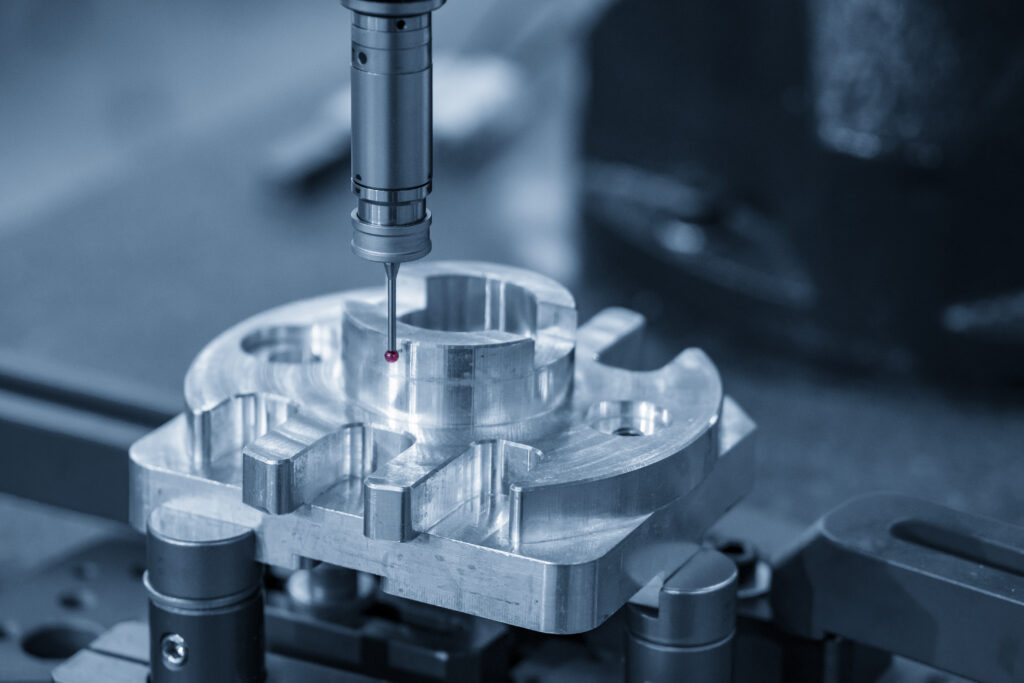
Why Laser Trackers?
Laser trackers are a well-established technology that can take highly precise measurements using a laser beam. Such systems use a hand-held probe which the system tracks in real-time at a very high degree of accuracy (down to a few microns).
Quite a lot of manufacturers already have these systems. They have been around since the 1980s and are used in many industries; particularly in aerospace and automotive. If this is the case for you, this new method of robot programming can be done with your existing technology.
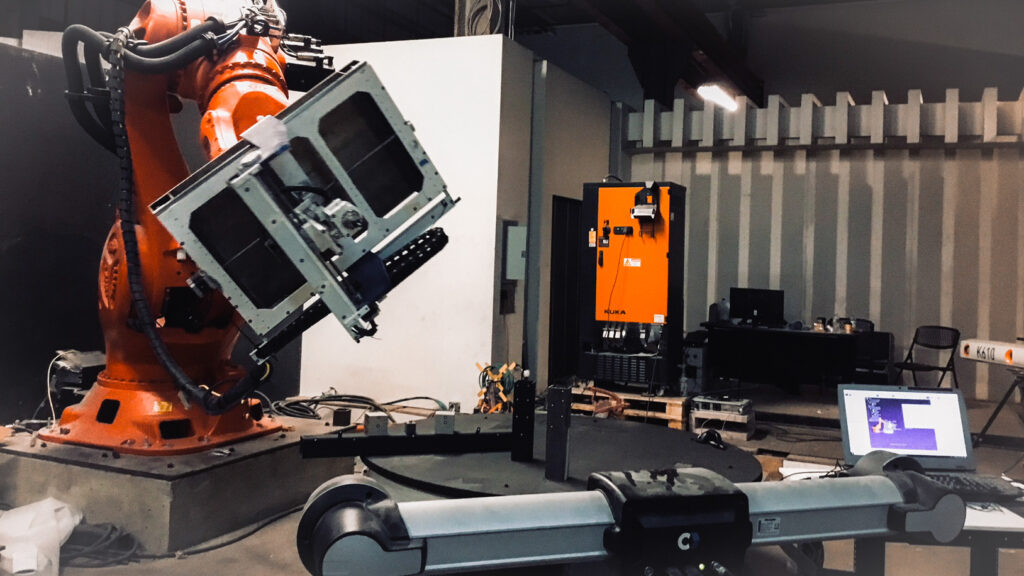
Introducing TwinTrack
At RoboDK, we have recently released TwinTrack; a robot programming system that uses a laser tracker to allow you to quickly and intuitively program your robot by hand.
We have teamed up with various providers of laser trackers to ensure that you can get high-precision programming with whichever system you prefer.
How TwinTrack Achieves High Precision Robot Programming
The precision of TwinTrack is provided by the laser tracker.
To use the system, you simply hold the tracker probe in your hand and place its tip where you want the robot to move. Teaching a point or a path to the robot is a simple case of pressing a button on the probe.
The laser tracker detects the precise position of the probe in real-time and sends it to RoboDK. Your robot model within RoboDK will then move to this position.
The precision of the system is thus the precision with which your hand can move the probe. While this may not be precise enough for tasks requiring sub-millimeter accuracy (due to the nature of human movements); it provides a far more intuitive, more precise, and less restricted way to program robots than, say, traditional hand-guiding.

Find Out If TwinTrack Could Be For You
With TwinTrack technology, you can program your robot more quickly, more easily, and more accurately than with other easy-to-use programming methods.
Would you like to find out if TwinTrack might be the right solution for your needs?
Check out our product page for more information. Or, get in contact with us directly and we’ll help you find out if TwinTrack is the right choice for you.
What programming methods have you tried that were not precise enough? Tell us in the comments below or join the discussion on LinkedIn, Twitter, Facebook, Instagram, or in the RoboDK Forum.