You’re looking to deploy a robot drilling system to your facility. What do you need to know to get started?
You might be uncertain about whether robot drilling is really suitable for your task. Do robots have sufficient performance for accurate drilling?
There are various benefits to choosing robot drilling over the alternatives, including more flexibility, reduced hands-on time, and better efficiency. But, to get these benefits you need to make sure that you are deploying the robot in the right way.
This article provides a quick guide to get you started with robot drilling without making the most common mistakes.
What is Robot Drilling?
Robot drilling is a type of automated machining operation where a drilling tool is fixed to the end of an industrial robot. Unlike conventional computer numerical controlled (CNC) drilling machines, robots have a larger workspace and can handle more complex shapes.
One of the major benefits of using robot drilling systems is their flexibility. With conventional CNC drilling, you are usually restricted to drilling in one or maybe two planes. With robots, however, you can drill in almost any orientation that you like.
This flexibility is very clear when you look at projects like the artwork produced by RoboDK users Neoset Designs for artist Robert Longo a few years ago. The artwork consisted of a huge metal sphere that was drilled with thousands of holes and positioned at regular intervals across the surface.
You could only achieve this type of project with robot drilling. Manual drilling would be too labor-intensive and the accuracy would be inconsistent. Other forms of drilling automation just wouldn’t be able to drill from so many different orientations.
Even if your drilling projects are more modest, this flexibility can be a valuable asset.
Does Robot Drilling Really Work? The Question of Stiffness
A common concern when companies first look into robot machining is that there won’t be sufficient stiffness.
Conventional CNC machines have extremely stiff mechanical structures. The stiffness of a CNC machine is often more than 50 Newtons per micrometer. This allows them to achieve very high accuracy even when machining hard materials.

Robots indeed have a lower stiffness than conventional CNC machines. Industrial robot arms often have a stiffness of just 1 Newton per micrometer. This means they can withstand 50 times less force than conventional machines.
What does this mean in practice?
With high forces and hard materials, the drilling tool of a robot will deflect more than that of a CNC machine. This corresponds to lower accuracy in such cases.
Is Lower Stiffness a Problem? It Depends on the Material
However, the lower stiffness of robots compared to CNC machines isn’t necessarily a bad thing.
Even the stiffest CNC machine in the world will deflect to some degree. The question is how much deflection is acceptable.
When you’re choosing a robot drilling system, you need to pay close attention to the material properties. With the right combination of robot and workpiece material, you can ensure that your robot drilling system has adequate stiffness for your chosen task.
What’s the Best Robot Arm for Drilling?
Which industrial robot arm should you choose for drilling?
The best robot for you will be the one that meets all your performance criteria whilst staying within your budget.
Many robot models are suitable for drilling some materials. However, only some will be right for the material you are working with and the performance requirements of your task.
Factors that affect robot drilling include:
- The stiffness of the robot, as we explained above.
- How the robot handles vibrations.
- The end effector options for robot machining.
- Programming options for the robot.
The quickest, simplest way to assess all of these factors is to ask your robot distributor or integrator. They will be most familiar with their catalog of robot models and will know which is suitable for your needs.
Properties like stiffness aren’t often listed on the datasheets for industrial robots. There are various analytical methods you could use to calculate the stiffness of a robot arm, but it’s usually better to just ask the manufacturer.
How to Deploy a Robot Drilling System
The deployment process for robot drilling is very similar to other robot machining projects.
You should start by assessing the needs of your task and comparing the various robots on the market. You can use our Robot Library to narrow down robots with particular traits (such as repeatability and payload) but you will need to ask the manufacturer for details about stiffness.
When you have decided on your robot, the next choice is your robot end effector. For this, you can use a machining or drilling spindle.
Finally, you will need to program the robot…
Programming Your Robot Drilling Machine
A common challenge when programming a robot drilling system is the large number of points in a drilling operation.
Unlike with welding, you can’t just instruct the robot to move along a straight line. You have to direct the robot to every drill hole on the surface of the workpiece. This can make programming very arduous.
You can significantly speed up your programming by using a programming tool that incorporates point programming.
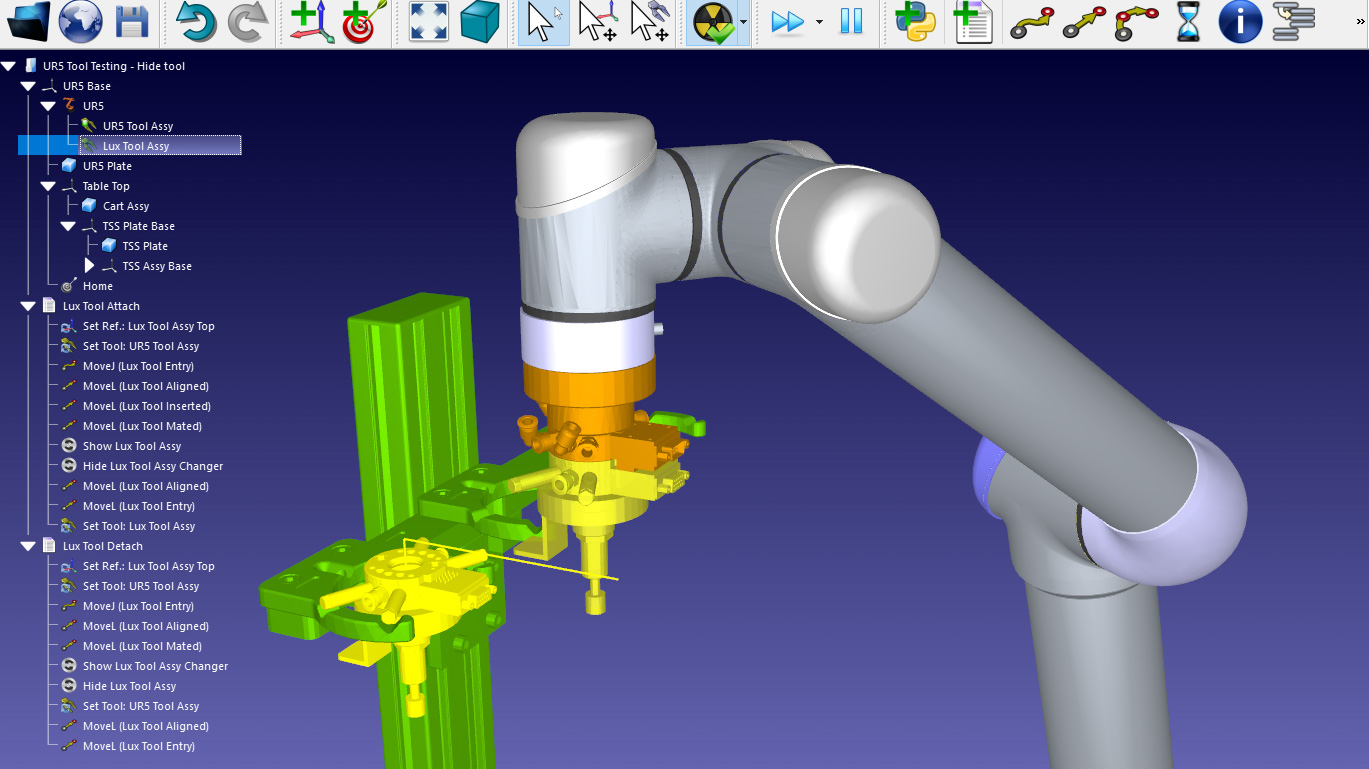
For example, RoboDK’s PointFollow wizard allows you to load a set of drilling points as a simple text file. It also has the capability to automatically turn a curved or straight path into a set of regularly spaced holes for drilling.
You can find out how to program drilling programs with this feature on our documentation page.
What aspect of robot drilling is most challenging for you? Tell us in the comments below or join the discussion on LinkedIn, Twitter, Facebook, Instagram, or in the RoboDK Forum.



