
知识介绍

机器人奇点与运动学奇点:有何不同?
在机器人学中,有一个概念经常被误解,那就是“奇点”。机器人学存在着两种类型的奇点,但它们含义截然不同。当您听到有人谈论奇点与机器人学时,确保明确他们所指的内容是非常重要的,否则会产生误解,无法互相理解。
继续阅读
15个使用机器人时的节能技巧
如果你不能控制管理能源和成本,机器人会消耗大量电力。这往往会导致更多的能源浪费,并额外增加了机器人的投资,减少了回报。 幸运的是,在使用工业机器人时,有多种方法可以节能。优化速度和加速度、改进编程轨迹和减少摩擦等技术对于节能来说非常简单有效。
继续阅读

20件可通过柔性制造做到的事情
灵活的制造使你能够快速调整生产线,以满足不断变化的客户需求。但是,通过为你的流程增加更大的灵活性,你的公司可以实现什么? 凭借快速重新配置设备和流程的能力,你可以快速响应市场的波动。通过使用机器人和正确的编程软件等技术,你可以提高制造公司的灵活性。
继续阅读

机器人关节类型:基本介绍
机器人关节种类繁多。了解这些不同的关节可以帮助你更好地理解你使用的机器人工作原理。 每种关节类型都会影响机器人的运动范围和能力。 机器人新用户面临的挑战是,有不同的方法对机器人关节进行分类。这会让他们感到困惑。 对关节类型的基本了解可以真正帮助你从你的机器人获得最大利益。本文中,我们将探索了解机器人关节类型的各种方法
继续阅读
机器人钻孔最好的末端执行器是什么?
如果你在市场上找用于机器人钻孔的末端执行器的话?你可能很难找到合适的工具。 在购买工具时,钻孔机器人和其它用于钻孔的机器一样吗? 或者需要知道什么额外的属性吗? 机器人钻孔是一个相对简单的任务。只需要一点基础知识就可以找到合适的末端执行器。
继续阅读
机器人编程工具:它们如何影响重点业务
如果你在考虑一款新的机器人编程工具。一款可以保证简化编程、提高效率的工具。 你要如何确定哪款工具最适合你的业务重点呢? 投资新的机器人编程工具有意义吗? 或者,你应该像以前那样继续编程吗? 你可能已经明白将机器人添加到业务中的好处。如果你已经使用机器人一段时间了,你可能已经看到了它们对你重点业务的影响。
继续阅读
TwinTrack VS手动引导:有何区别?
它们都是一种比传统编程更加直观的编程方式。但是,TwinTrack和手动引导有什么区别? 我们发布了TwinTrack——我们为工业机器人提供的新型编程方式。它让你只需用激光跟踪器的手持式探头追踪你想要的路径,就可以为你的机器人编程,无需常规的编程。
继续阅读
终极选购指南——机器人应用中的辅助定位器
你是否在考虑购置一个机器人辅助定位器?现在市面上有各种各样的定位器可供选择。它们的轴心、负载量和配置各异。那么问题就在于,我们该如何选择最符合我们需要的定位器呢?
继续阅读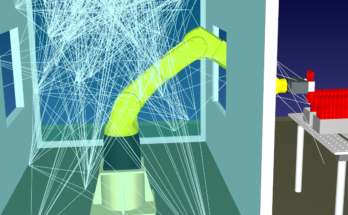
10个使用机器人运动规划器的竞争优势
正如我们前面介绍的,运动规划器减少了人工机器人编程的工作量,但是从“付出=回报”的商业角度来看,它到底值不值得投入使用呢? 正如我们前面介绍的,运动规划器减少了人工机器人编程的工作量,但是从“付出=回报”的商业角度来看,它到底值不值得投入使用呢?
继续阅读
RoboDK的PRM运动规划器
在工作中,我们并不总能保证自己的工作空间是整洁与自由开放的。这对于机器人的工作空间也是一样的道理。
继续阅读
回到基础——机器人的运动规划
“回到基础”这个系列意在为读者介绍与工业机器人相关的基础知识。事实上,之前我们介绍欧拉角与几何旋转原理的文章,是本站阅读量最高的博文之一。
继续阅读