复合材料铺层(制造复合材料零件过程中的核心步骤)通常来说属于一个需要大量劳动的过程。
该过程需要熟练的技术人员使用专用工具和设备制造所需的零件。而这通常耗时耗力且成本很高,限制了复合材料制造商可以制造的零件数量。
法孚的复合材料及自动化解决方案小组开发了一种技术,允许客户使用机器人纤维放置头创建复合材料部件。这项技术为复合材料叠层工艺提供了一个低成本的切入点,使制造商更容易制造出所需的零件。
这可能会显著改善法孚客户的复合材料铺层工艺。像这样的机器人解决方案可以帮助更多的公司从自动化中获得好处,并获得更强势的竞争力。
归根结底,其最大的受益者是终端用户,此案例中就是航空公司。
以下是法孚如何使用RoboDK提出他们新的解决方案。
为什么航空航天需要减小光纤放置的公差
众所周知,航空航天工业的质量要求比其他许多行业都要严格,对于公差的要求也不例外。飞机制造涉及强度和重量之间的微妙平衡。与其他行业相比,这些行业的容错率很低,因为在其它行业,安全性可以通过高安全系数得到保证——而对于一架飞机而言,你需要保证你在正确地建造。
这些严格的要求使得使用高质量的材料和制造工艺尤为必要。
纤维放置就是这样一个过程,需要严格的公差。纤维在复合材料零件中的准确位置对成品的强度和耐久性至关重要,例如飞机机翼。
复合材料在减轻飞机重量、提高燃油效率和减少环境影响方面发挥着重要作用。纤维增强塑料以其高的强重比在航空航天工业中得到了广泛的应用。
纤维植入是一个劳动密集型的过程。一个零件可以包含成千上万的纤维,这几乎不可能人工放置。
自动化纤维铺设是一种使用自动化机械制造多层复合材料产品的过程。

关于法孚和高精度机器的介绍
法孚是一家跨国工业工程集团,它为客户提供创新的解决方案和产品,帮助主要行业领导者提高业绩。
该公司的理念是,工业是现代世界重大问题的答案,如环境、社会和经济挑战。
高精度机器团队是法孚中的一个团队。该团队致力于开发满足最严格的精度、重复性和可靠性要求的制造机械。
他们的技术包括材料去除解决方案,复合材料和自动化解决方案、研磨、切割、填充、密封和激光系统。
该集团一直在寻找新的方法来帮助客户改进流程。这可能意味着会创建与市场上现有选项不同的解决方案,如本项目。
机器人光纤放置
制造商所面临的一个挑战是,复合材料铺层工艺往往复杂且昂贵。因此引入自动化是必要的,但起步的成本可能会让一些公司和制造集团望而却步。
Amanda Kotchon,法孚的控制工程师解释道:
我们希望通过支持终端用户在航空航天公差范围内快速制造复杂零件,从而为复合材料铺层市场提供一个成本较低的切入点。
为了做到这一点,该小组在名为Cincinnati Robotic Viper的项目中决定使用机器人进行纤维放置来完成这一繁杂的工作任务。

他们需要在离线编程环境中对机器人进行编程。但问题是,市场上的机器人系统不允许精确编程。
Kotchon继续说道:
当我们开始这个项目时,大多数机器人制造商都没有提供准确或正确的机器人模型。
只能假设你购买的机器人与标称几何形状完全匹配——然而我们知道这是不真实的。
这导致研究小组发现,对于大多数成品机器人来说,定位误差会在1-10毫米之间,然而这对于他们的工艺来说是不可接受的。他们的应用要求以非常高的速度(在毫秒内)精确地同步数百个点,从而满足所需的处理速度。
他们需要找到一个不被机器人制造商的生态系统所束缚的解决方案。
RoboDK就出现了
RoboDK为团队提供了一个灵活的平台,提供了他们所需的准确性和易用性。
RoboDK的校准功能是使用它的核心优势。校准是RoboDK最强大的功能之一。它允许你快速轻松地提高几乎任何工业机器人的精度。
对于法孚而言,RoboDK的校准功能为他们提供了满足严格公差所需的控制。
Kotochon说道:
RoboDK不仅提供了校准软件,而且让我们深入了解了机器人行为的根本原因和机器运动中的误差源,这对我们非常有帮助。
我们感谢RoboDK愿意在我们开发应用程序时与我们并肩工作,并深入研究机器人力学,为新的挑战提出创造性的解决方案。
团队的机器人设置
我们总是希望看到我们的用户如何设置他们的机器人硬件和软件以实现最大效率。
以下是他们系统的配置:
机器人硬件
该解决方案基于以下两个核心硬件:
- 一台ABB IRB 8700机器人
- 用于放置纤维的自定义末端执行器。
机器人软件
系统的核心软件包括:
- B&R控制平台。支持他们与ABB机器人和COMAU机器人的集成。
- 团队的ACES软件。使用客户的零件数据确定最佳碳纤维位置和零件几何结构。
- 定制版的RoboDK,用于校准机器人并使用生成的校准校正机器人运动。

系统如何运作
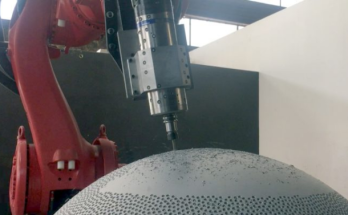
该解决方案可以生产复杂的弯曲复合零件。
为了达到所需的路径和位置精度,团队首先使用RoboDK校准。这解决了每个成品工业机器人和理想机器人模型之间的差异。然后,系统中的每个机器人都会收到自己特定的校正调整。
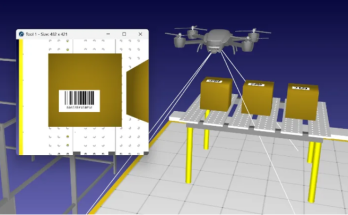
该系统使16个单独的电动卷轴和切割器与生成的机器人路径同步。他们通过机器人光纤放置头和软件的结合来实现这一点。
路径与团队B&R控制器上的过程数据同步。这使他们能够精确地计时光纤布置过程中需要发生的数千个输入输出。
谁是法孚复合材料铺层解决方案的理想用户?
通过该项目,法孚集团旨在为复合材料铺层项目提供一个低成本的切入点。通过使用机械臂,校准到符合航空航天的公差。
高精度机器团队的工程总监Brent Keller解释说,该解决方案的完美用户位于市场上服务不足的缺口:
该解决方案非常适合寻找具有位置精度的运动平台的终端用户,该平台填补了“现成”机器人系统和笛卡尔机床平台之间的空白。
未来,该集团计划扩大机器人平台在复合材料铺设和自动化中的应用。