Kawasaki RS20N robot
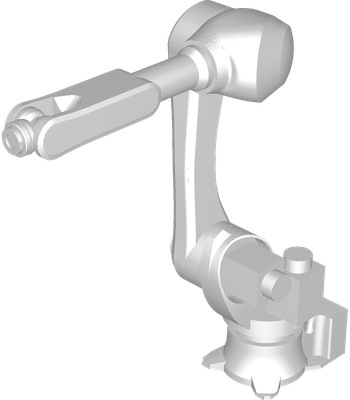
Il robot Kawasaki RS20N è un Braccio robotico a 6 assi, ha un carico utile di 20 kg e uno sbraccio di 1725 mm. Le applicazioni di produzione includono Trattamento dei materiali.
Le applicazioni comuni di Kawasaki RS20N includono: Produzione additiva, Assemblaggio, Erogazione, Trattamento dei materiali, TCP remoto, Saldatura.
Il Kawasaki RS20N è prodotto da Kawasaki.
Usa questo comparatore di robot per trovare robot simili a Kawasaki RS20N.
Sfoglia l'intera libreria.
Specifiche
| Marchio | Kawasaki |
| Modello | RS20N |
| Tipo | Braccio Robotico |
| Axes | 6 |
| Carico utile | 20 kg |
| Portata | 1725 mm |
| Ripetibilità | 0.04 mm |
| Peso | 230 kg |





