Pick and place is one of the foundational applications in robotics. With the right system, you can apply pick and place robot to a huge range of tasks in your business… but how do you choose the right robot?
Whether you’re working in manufacturing, logistics, ecommerce, or another area, you almost certainly have tasks that can benefit from robotic pick and place. This simple task can reduce cycle time, increase throughput, and improve consistency.
But choosing the right pick and place isn’t always straightforward. Almost any robot model can be used for this foundational task, which makes robot selection quite challenging.
This guide walks you through everything you need to know to choose the right pick and place for your needs.
What Is a Pick and Place Robot?
A pick and place robot is any robot that can pick up an object from one location and move it to another location. The most basic option is a robotic manipulator with a gripper as an end effector.
Given the simplicity of the task, it is uncommon to find robot models that are only designed for pick and place tasks. More commonly, pick and place will be one of many applications a robot can perform.
The right type of robot for your pick and place application will depend on factors like the objects being moved and environment.
Types of Pick and Place Robots
Most industrial robots can be used for pick and place tasks. However, some types of robot are used most often.

Here is a table of the top robot types used for pick and place, along with the pick and place tasks that they are best for:
| Robot Type | Description | Best For | Key Benefits |
|---|---|---|---|
| Articulated | Multi-joint arm | Versatile tasks, heavy payloads | Flexible range, precise motion |
| SCARA | Horizontal movement arms | High-speed horizontal tasks | Fast, compact, accurate |
| Delta | Triangular movement | Lightweight, high-speed tasks | Extremely fast, low payload |
| Cartesian | Linear X-Y-Z motion | Large part handling | Straight-line precision, scalable |
Are Any Robots Unsuitable for Pick and Place?
For the most part, when we talk about pick and place robots, we are referring to robotic manipulators of the types listed above.
While other robots could be used for pick and place tasks, it would be more common to use different terms. For example, an automated guided vehicle (AGV) or unmanned aerial vehicle (UAV) could move objects from one place to another, but the distances are larger so it would make more sense to talk about material transport.
Key Factors to Consider Before Choosing a Pick and Place Robot
When you are evaluating robot models for a pick and place task, it’s helpful to consider the following factors:
- Speed and Throughput — What cycle time do you need for your task? How many objects need to be transported per minute or per second?
- Payload Capacity — What is the maximum weight and size of objects that the robot needs to transport?
- Precision — What accuracy does the robot need to achieve, for both the pick and the place parts of the task? Will you need to use robot calibration to improve precision?
- Work Envelope — What is the available space for the robot in your facility?
- Ease of Programming — How much robotics expertise do members of your team already have? What other software tools do your robot programming software need to integrate with?
These questions can help you to narrow down the range of robots models for your pick and place task, helping to make your decision easier.
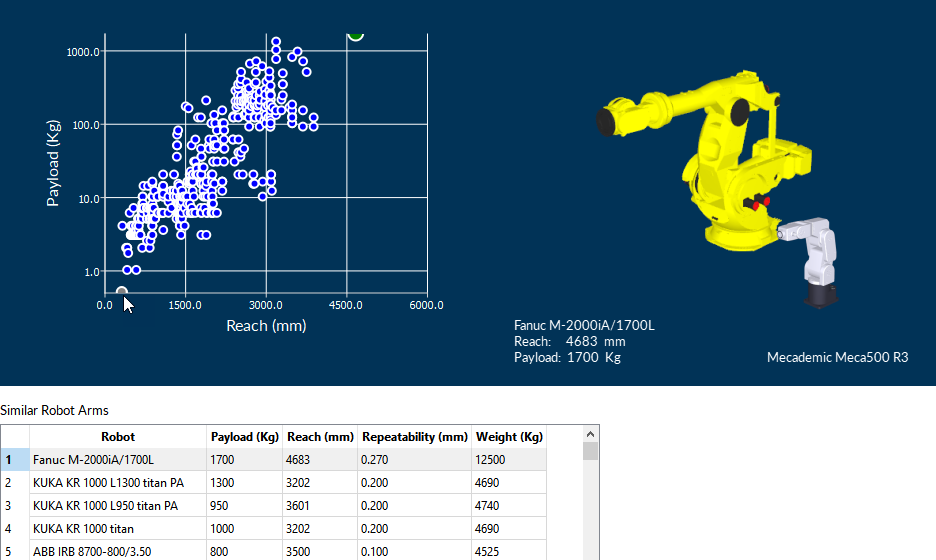
Once you have decided on these factors, use the filters in our extensive Robot Library to narrow down your options.

Why Simulation Is Critical in Pick and Place Projects
One of the most overlooked aspects when choosing pick and place solution is programming. While the task is simple to program compared to more complex robotic applications, you can make it even easier by using the right robot programming software.
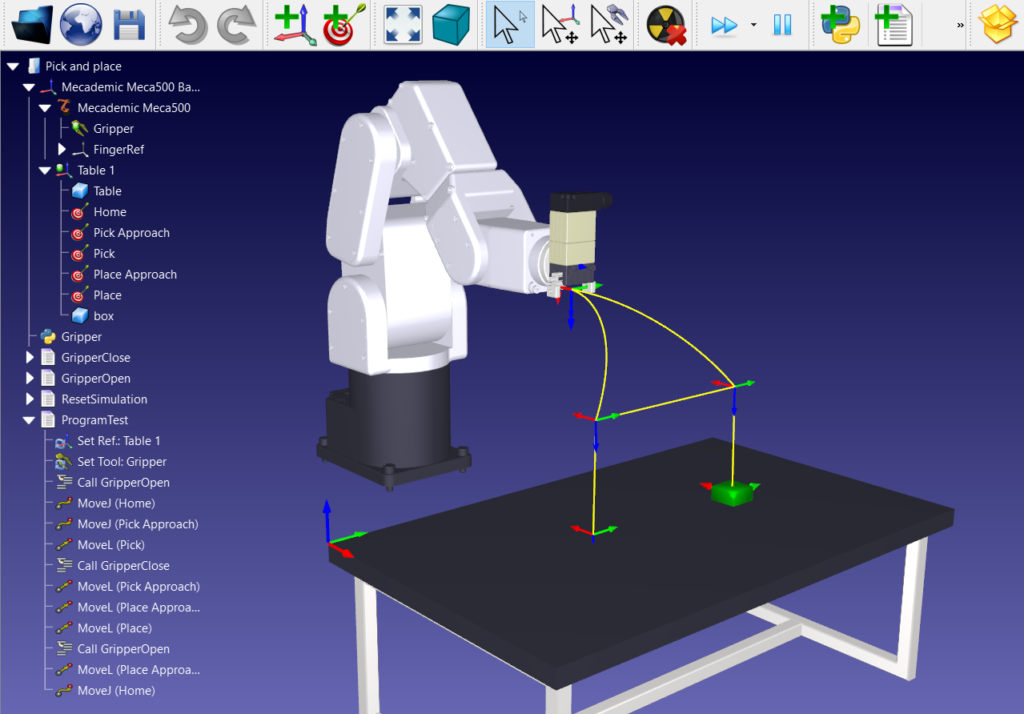
Simulation allows you to test your pick and place task in a virtual environment before deploying it to a physical robot. This allows you to avoid programming errors, optimize motion paths, and eliminate collisions.
A programming tool like RoboDK also provides functionality for more advanced pick and place tasks, like multi-robot setups or sensor integration.
For more in-depth explanation, check out our guide How to Program a Pick and Place Robot with RoboDK
FAQs About Pick and Place Robots
Do you have questions about pick and place robots?
A good place to ask your question is in our Robot Forum where our active community or a member of the RoboDK can point you in the right direction.
Here are a few frequently asked questions about pick and place robots:
What’s the Best Pick and Place Robot?
There is no “best” robot for pick and place. In fact, for such a simple task, there are probably dozens of suitable robot models for your task. For this reason, it often makes the most sense to find one that meets the required factors listed above and then choose one that is “good enough.”
Is My Industry Suitable for Pick and Place?
It doesn’t matter your industry, pick and place is so widely applicable the answer is almost certainly yes. Even in highly regulated industries, like medical device manufacturing, there are dozens of tasks that are suitable for pick and place.
Do I Need to Know Robot Programming for Pick and Place?
No! With a programming tool like RoboDK, you can easily deploy a pick and place task with no robot programming experience at all.
We also have a dedicated RoboDK Webinar recording that guides you through deploying a pick and place task from scratch.
Smarter Selection Starts with the Robot Library
If you want to significantly speed up your deployment, a good place to start is the RoboDK Robot Library.
You can use the library to narrow down your selection of robot models, then immediately test them in a simulated environment.
With RoboDK, you can get your pick and place robot up and running quickly and easily.
What pick and place application are you thinking of deploying? Join the discussion on LinkedIn, Twitter, Facebook, Instagram, or in the RoboDK Forum.. Also, check out our extensive video collection and subscribe to the RoboDK YouTube Channel