Each robot application can have very different programming requirements. With these RoboDK Add-ins targeted at specific applications, you can optimize your robot’s capabilities for those tasks.
When you are programming a robot, the right tools can make all the difference. Our extensive RoboDK Marketplace contains an impressive range of utilities for optimizing specific robot applications. With tools for everything from welding path optimization to multi-robot synchronization, there is bound to be an Add-in for your unique workflow.
Here are 9 of the top RoboDK Add-ins for optimizing specific robot applications:
Probing App for Alignment Precision
The Probing Add-in enables you to create efficient probing sequences for aligning parts in your robot cells.
Who is the Add-in for?
The Add-in is perfect for anyone working in applications that require automated part alignment, such reverse engineering or quality control.
What does it do?
Features include:
- Defining and editing probing points on CAD models.
- Automatic detection of key features like planes or cylinders.
- Streamlined pairing with RoboDK’s calibration tools to further optimize probing accuracy.
Machining Tools for Perfect Milling Calibration
Machining Tools provides a comprehensive set of features to streamline a range of robot machining operations, such as milling, engraving, or CNC-like tasks.
Who is the Add-in for?
The Add-in is ideal for anyone that is working with robot machining applications. It helps you perform tasks like calibrating your machining spindle and improve programming.

What does it do?
Features include:
- Correcting the orientation of the spindle axis with reference tools for precise machining.
- Updating the Tool Center Point (TCP) based on the tool length and type.
- Accurate calibration of references tools using 3 distinct and powerful methods.
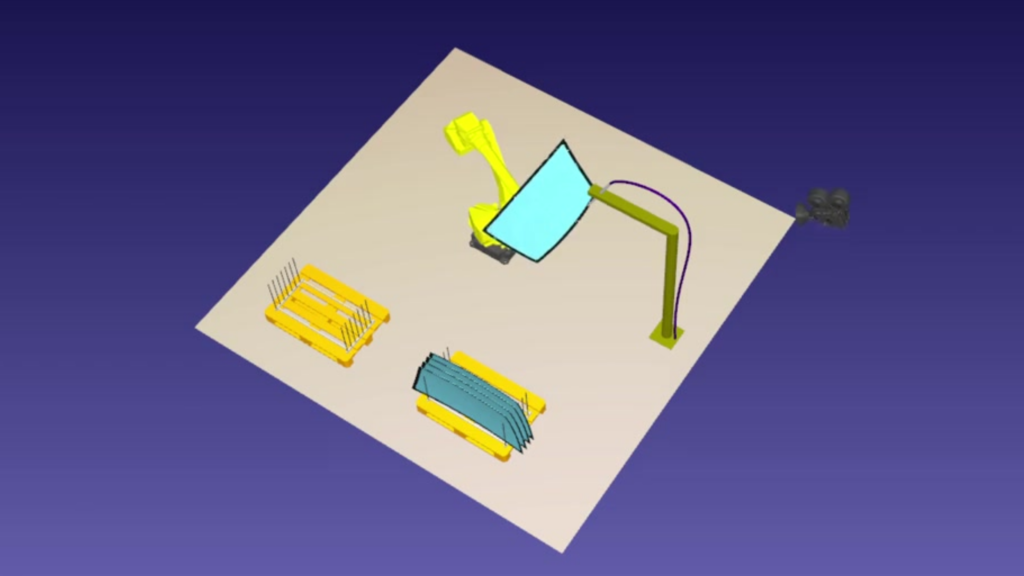
Surface Pattern Generator for Pattern Automation
Surface Pattern Generator is designed to help you simplify surface patterns of robot movement on the surface of workpieces and other objects.
Who is this Add-in for?
This app is ideal for anyone using a robot for applications that require complex and repetitive surface operations. Examples include painting, polishing, quality inspections, dispensing, and any applications involving curved or irregular surfaces.
What does it do?
Features include:
- Ability to define regions of interest on an object surface with adjustable sizes and step sizes.
- Generation of multi-pass patterns with vertical offsets, such as for robotic 3D printing projects
- Automatic creation of Curve Follow projects within RoboDK for immediate robot programming.
Welding App for Seamless Weld Management
Welding is our “Swiss Army Knife” Add-in for weld programming functionality. It provides a range of functionalities to improve parametric welding.
Who is this RoboDK Add-in for?
The add-in is perfect for welders looking to improve their process by adding a robot. Robot welding can significantly improve the productivity of your operation compared to manual welding.
What does it do?
Features include:
- Easy creation of welding-specific commands (e.g. weld start, continue), parameters for these commands, and creation of custom code.
- Visualization of weld trajectories and weld creation outputs.
- Saving of all created objects into your RoboDK station project.
Weave Generator for Welding Precision
Weave Generator simplifies the process of creating custom weaving patterns for welding and other tasks that require a similar motion.
Who is the Add-in for?
The Add-in is ideal for anyone who wants to further optimize their robotic welding by adding complex paths. It allows the creation of intricate welding patterns and weld bead objects.
What does it do?
Features include:
- Application of complex weaving patterns to existing robot welding programs.
- Addition of weld bead objects along pre-existing weld paths.
- Easy adjustment of weave properties to suit your application, including amplitude, frequency, and spacing.
OPC UA Plug-in for Industrial Connectivity
OPC-UA adds compatibility for the Industry 4.0 protocol Open Platform Communications – Unified Architecture.
Who is these RoboDK Add-ins for?
The Add-in is a must-have if your project relies on this open communication protocol. Unlike the traditional industrial protocols like TCP/IP or COM/DCOM, the Unified Architecture is platform independent and natively supports the Internet of Things (IoT).
What does it do?
Features include:
- Addition of RoboDK as either an OPC-UA server or client.
- Retrieval and setting of station parameters.
- A range of functions and variables for the RoboDK simulation, such as simulation speed and robot joint positions.
RoboDK CNC for Drip-Feeding Large Programs
RoboDK CNC makes it much easier to execute large robot programs on robot controllers with limited memory capacity for CNC projects.
Who is these RoboDK Add-ins for?
The Add-in is a necessary addition to your workflow if you are working with projects involving large amounts of CNC code. It splits such massive machining projects into smaller chunks and streams them to the controllers to ensure uninterrupted execution.
What does it do?
Features include:
- Easy processing of millions of lines of CNC code.
- Support for external axes and integration with controllers like KUKA KRC, ABB, Fanuc, Universal Robots and other robot controllers.
- Real-time monitoring of program execution via an intuitive interface.
Coordinated Motion for Multi-Robot Synchronization
Coordinated Motion is essential for advanced manufacturing setups that involve multiple robots or synchronized motion with external devices like rails.
Who is these RoboDK Add-ins for?
The Add-in is ideal if your project requires multiple industrial robots to coordinate their motion for a collaborative task. It enables precise synchronization of the robot movements and TCP offsets.

What does it do?
Features include:
- Synchronization of two robots, including external axes, in pose and stance.
- Mirroring of tool position, keeping a relative offset consistent between the two tools.
- Support for API commands to allow pairing and unpairing of the robots.
TwinTrack for Teaching Robots by Demonstration
Twin Track is one of our flagship RoboDK Add-ins that allows you to teach your robot any application through demonstration when using our TwinTrack solution.
Who is the Add-in for?
The solution is perfect for anyone who wants to make robot programming significantly easier. Instead of using standard robot commands, TwinTrack allows you to physically demonstrate the robot motion for flexible, hands-on programming.
What does it do?
Features include:
- Calibration and recording of robot motion paths using an off-the-shelf probe.
- Filtering of robot curves and motions for maximum kinematic accuracy.
- Up to 0.15 mm positional accuracy with no need to touch-up targets after path recording.
Find out more about TwinTrack on our solutions page.
Discover Your Next Favorite RoboDK Add-in
With these 9 RoboDK Add-ins and many more available in our Add-in Marketplace, we have solutions tailored to almost any robot application you can imagine.
Whether you are using your robot for welding, painting milling, painting, or more, there is bound to be an Add-in that can help streamline your programming workflow.
Which add-in will you try first? Join the discussion on LinkedIn, Twitter, Facebook, Instagram, or in the RoboDK Forum.. Also, check out our extensive video collection and subscribe to the RoboDK YouTube Channel