TwinTrack VS手动引导:有何区别?
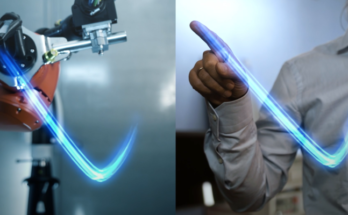
它们都是一种比传统编程更加直观的编程方式。但是,TwinTrack和手动引导有什么区别? 我们发布了TwinTrack——我们为工业机器人提供的新型编程方式。它让你只需用激光跟踪器的手持式探头追踪你想要的路径,就可以为你的机器人编程,无需常规的编程。
继续阅读工业机器人应用从未如此简单
它们都是一种比传统编程更加直观的编程方式。但是,TwinTrack和手动引导有什么区别? 我们发布了TwinTrack——我们为工业机器人提供的新型编程方式。它让你只需用激光跟踪器的手持式探头追踪你想要的路径,就可以为你的机器人编程,无需常规的编程。
继续阅读
你可能没有注意到,我们一直在不断地改进RoboDK。我们团队的工作就是让你的机器人编程体验更好、更轻松。 自2022年初,我们已经在RoboDK软件中推出了许多更新,可能你都没有注意到。
继续阅读
自动化解决方案提供商Wilder Systems为飞机开发了一种独特的机器人“免下车”清洗系统。该系统取代了传统的人工清洗并将任务时间节约了95%,通过使用 RoboDK编程软件,航空航天制造商即使在没有操作机器人经验的情况下也可以对任务进行编程。
继续阅读
这个月,RoboDK发布了TwinTrack模块,这是一个高效又便捷的编程工具,让用户可以通过手持式探针定义所需实现的机器人运动,快速且准确地为工业机器人编程。
继续阅读
一个多月以前,我们介绍了如何选购机器人辅助定位器。那么,如果你现在正试图使用机器人定位器来扩展你的机器人性能,最好的编程方式是什么呢?有很复杂的办法,也有简单的方案。
继续阅读
每个机器人编程人员都有自己的编程偏好,今天我们介绍自定义RoboDK界面的10种方法,以方便用户使用。
继续阅读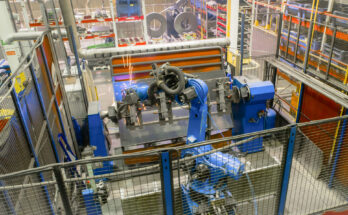
你是否在考虑购置一个机器人辅助定位器?现在市面上有各种各样的定位器可供选择。它们的轴心、负载量和配置各异。那么问题就在于,我们该如何选择最符合我们需要的定位器呢?
继续阅读
你是否还在犹豫着要为你的机器人程序建模,却对质量不高的CAD模型有所担忧?别担心!RoboDK最新开发的Solid Edge插件可以帮你通过软件内简便的机器人编程操作,实现同步设计的强大功能。
继续阅读
上个月,RoboDK又有主要的新版本发布了,它包括很多最新的功能!与过去相比,除了性能有了更多的改善以外,我们还提高了与更多机器人、机器人工具的兼容性,优化了技术支持功能。
继续阅读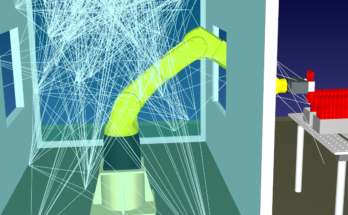
正如我们前面介绍的,运动规划器减少了人工机器人编程的工作量,但是从“付出=回报”的商业角度来看,它到底值不值得投入使用呢? 正如我们前面介绍的,运动规划器减少了人工机器人编程的工作量,但是从“付出=回报”的商业角度来看,它到底值不值得投入使用呢?
继续阅读
在工作中,我们并不总能保证自己的工作空间是整洁与自由开放的。这对于机器人的工作空间也是一样的道理。
继续阅读
“回到基础”这个系列意在为读者介绍与工业机器人相关的基础知识。事实上,之前我们介绍欧拉角与几何旋转原理的文章,是本站阅读量最高的博文之一。
继续阅读
人们对于工业机器人编程普遍有一些错误的概念。以下是15个你可能不知道的相关事实:
继续阅读
今年,是RoboDK成立的五周年,我们想在此总结一下公司的发展历程以作纪念。
继续阅读
Rhino软件的灵活性,加上强大的CAM工具,再加上RoboDK的机器人编程技术,可以给用户带来不可估量的工作成效。想要把三者结合在一起,你只需使用RoboDK最新的RhinoCAM插件就可以了!
继续阅读