
Easier and Faster Offline Programming
Robots are becoming one of the most commonly used technologies in many industrial settings. However, programming industrial robots often remains […]
Robots are becoming one of the most commonly used technologies in many industrial settings. However, programming industrial robots often remains […]
The RoboDK API offers a powerful set of tools for you to quickly and easily program more complex robot tasks.

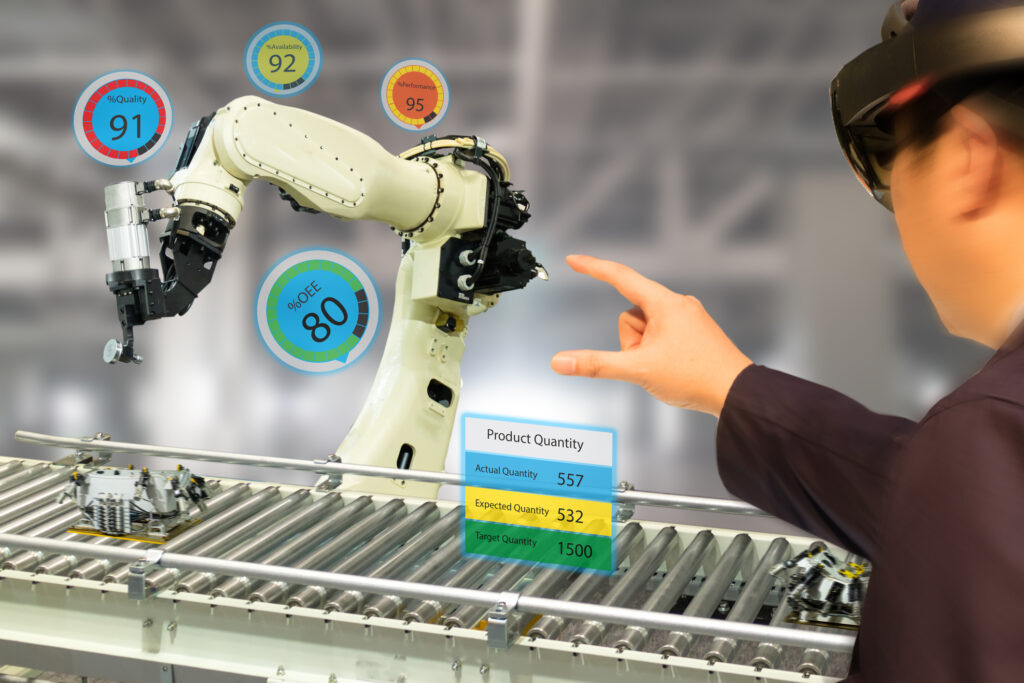
What could your business achieve if you could minimize downtime? Downtime is an inevitable part of any manufacturing process. But

Robot programming is an integral part of automation deployment. But you need to optimize your programming workflow if you want

How can you make offline programming even more beneficial for your business? Offline programming for robots helps to reduce on-site

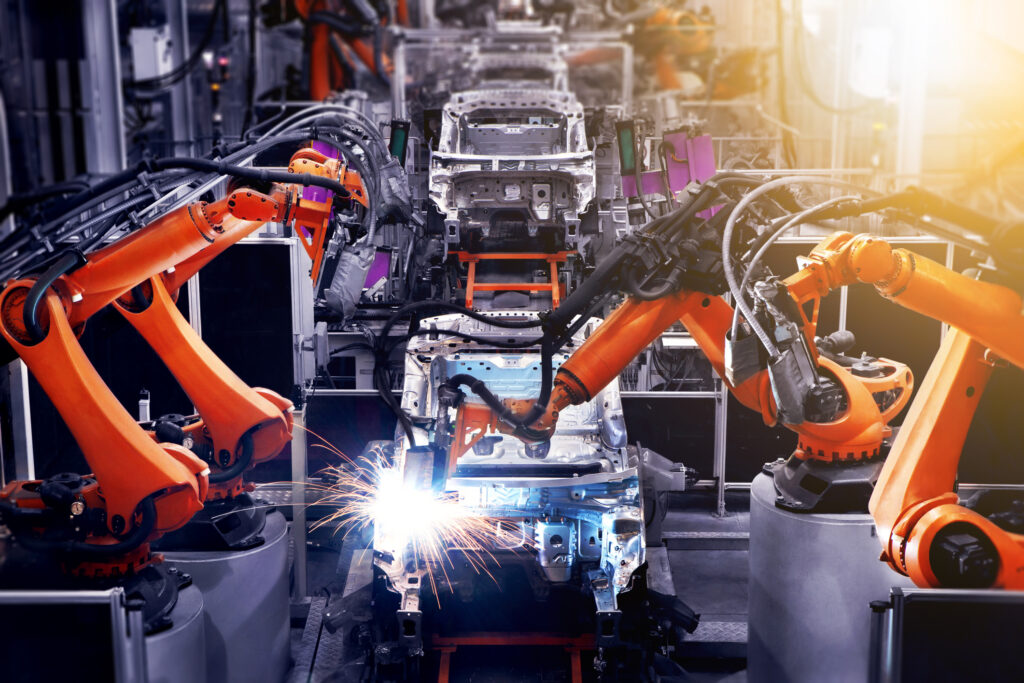
Robots are increasingly becoming a staple technology in various industries. They offer efficiency advantages over conventional processes in terms of
Robot singularities can cause havoc when you are programming a robot. But, what is a singularity? How can you stop

Do you want to access the more advanced features of RoboDK and its API? The new Docker image could make

You’re using a simulated robot or CNC machine… but it’s not performing correctly. Could it be time to use a
Industrial robots have become more and more popular in manufacturing settings over the years. You can now apply a robot
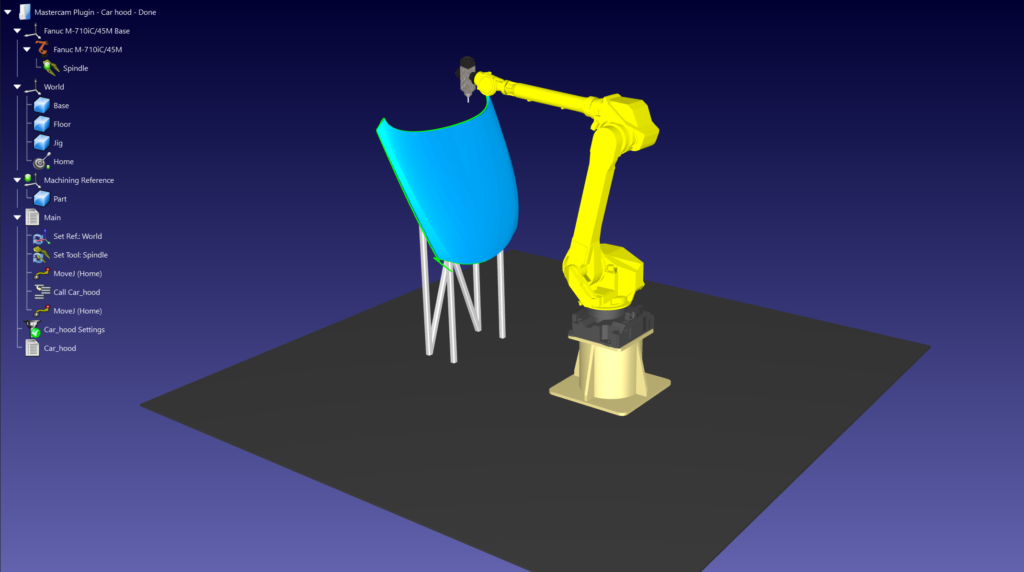
Want to get more productivity from your FANUC robot? And spend less time programming it? Offline programming could be the

How can you get started with robot training? You might imagine that robot programming courses would cost a lot. But,
You’re looking to deploy a robot drilling system to your facility. What do you need to know to get started?
If you’re a fan of the Python programming language (and who isn’t?) you might wonder if you can use it

If you’re like us, you love new features that make your life easier when programming your robot. That’s why we’re

Canadian robotics software provider RoboDK has released TwinTool, an application that offers fully automated robot tool calibration for industrial robots.