
You’re using a simulated robot or CNC machine… but it’s not performing correctly. Could it be time to use a post processor editor?
What does a post processor do and why would you want to edit one?
If you’re using offline programming, it’s very likely that you have interacted with a post processor. Maybe you’re using RoboDK to program a robot for robotic machining or another robotic application. Or perhaps you are using a CAD/CAM system that supports your CNC machines.
Even if you’re not aware of it, you are using a post processor whenever you use such a system to program your physical machines.

A post processor is the bridge between the simulated environment and your physical machine. It converts the simulated instructions into code that the robot can use.
But, what if you want to change how the program generates this code? That’s where a post processor editor comes in…
Why Would You Need To Edit a Post Processor?
Most people will never need to edit their post processor.
If you are using RoboDK, for example, you just download your robot model from our extensive Robot Library. We have already linked each model to one of the 80+ post processors within RoboDK. Whenever you send your simulated program to the physical robot, the post processor will convert the code for you “under the hood.”
However, there are some situations when you will need to edit your post processor.
Every robot manufacturer uses its own proprietary programming language, which runs on its own robot controller. Each controller has a range of different configuration options and features. The post processor is where you can set all of these custom configuration options.

For example, Techman robot controllers include a security option to ask the user for a password before they can reprogram the robot. The post processor is where you will find the options to enable, disable and set this password. Not all robots have this option.
What is a Post Processor Editor?
A post processor editor is a dedicated software that is used to edit robot or CNC post processor files. This makes post processor editing more intuitive than with a standard text editor, which is the only option for many programming systems.
An example of such software is the post processor editor that is included in RoboDK.
RoboDK post processors are written in the Python programming language. For each of the supported post processors, there is a compiled library (a PYC file) and an editable Python script that holds all of the configuration properties.
These configuration files can be edited with any standard text editor if you want full control of the configuration. However, RoboDK also offers a more intuitive post processor editor. This allows you to change the parameters of your chosen robot without having to get involved in the code at all.
How to Edit a Post Processor the Easy Way
In RoboDK, the easiest way to edit your post processor is to use our post processor editor. It provides information about when you are most likely to use each of the parameters and recommended values. With this tool, you will cover the vast majority of use cases for your robot.
Each post processor contains a list of configuration properties. These will vary depending on your robot manufacturer.
Some post processors include very few properties. For example, the post processor for Mecademic robots only includes one property (the file type of the program file).
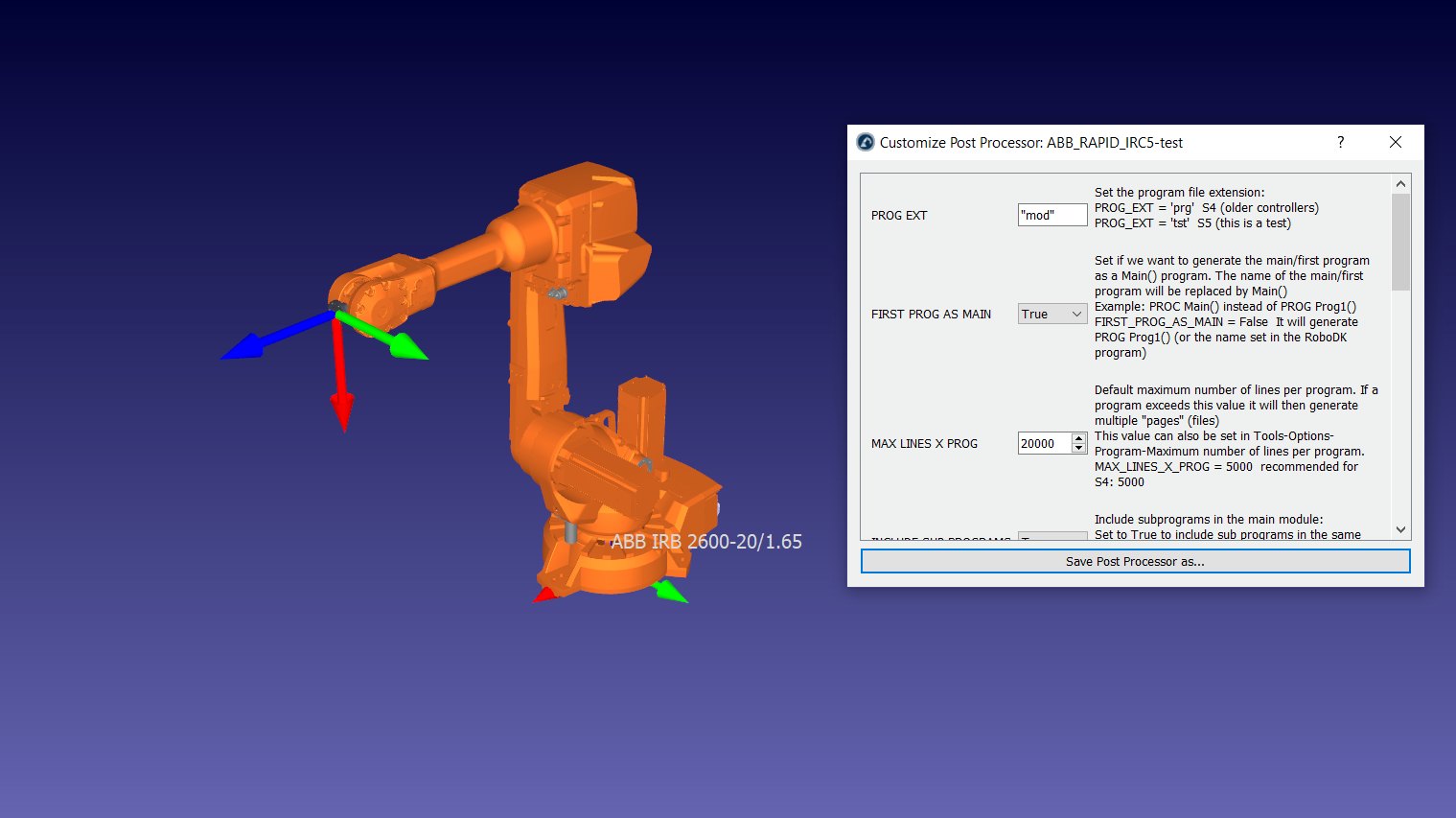
Other post processors include many properties. For example, the ABB_RAPID_IRC5 post processor for ABB robots has 16 properties, ranging from the default speed of the robot to configuration flags for external turntables.
Whatever robot you are using, the simplest way to edit its post processor is to load it up in the RoboDK editor. You will be able to see all of the available configuration properties and decide which are the most suitable for your application.
The Simple Post Processor Editing Guide
When you open the post processor editor, you will be greeted by a list of the available properties.
How do you decide which properties to adjust and what values to set them?
Let’s use a specific example to show the process… We’ll look at the AUBO post processor for the company’s collaborative robot range.
The AUBO post processor contains the following properties:
- PROG EXT — This is the program extension and is included in many post processors. It specifies the file type that RoboDK will generate.
- SPEED MS and SPEED RAD — This specifies the speed in meters per second and radians for circular movements.
- ACCEL MSS and ACCEL RADSS — This specifies the acceleration of the robot in meters per second squared or radians per second squared for circular accelerations.
As you can see, the properties are often clear just from their naming conventions. However, where the purpose of a property is not immediately obvious, there is usually a description of it in the editor and often recommended values as well.
If you still can’t work out the purpose of a particular property, you may be able to find information in your robot’s manual or you can ask a question in the RoboDK forum.
Where to find the New RoboDK Post Processor Editor
Started editing your robot’s post processor with the RoboDK editor!
You can find information about how to activate and use the editor on our documentation page.
Questions? Tell us in the comments below or join the discussion on LinkedIn, Twitter, Facebook, Instagram, or in the RoboDK Forum.. Also, check out our extensive video collection and subscribe to the RoboDK YouTube Channel



