如果你希望在你的工厂部署机器人钻孔系统。你是否知道怎么才能开始?
你可能不确定机器人钻孔是否真的适合你的任务。机器人有足够的性能进行精确钻孔吗?与其他方案相比,选择机器人钻孔有多种好处,包括更好的灵活性、更少的人工时间和更高的效率。但你需要确保以正确的方式部署机器人,才能发挥这些优势。
本文提供了一份快速指南,帮助你在不犯常见错误的情况下开始使用机器人钻孔。
什么是机器人钻孔?
机器人钻孔是一种自动加工操作,其钻孔工具固定在工业机器人的末端。与传统的计算机数控钻床(CNC)不同,机器人有更大的工作空间,可以处理更复杂的形状。
使用机器人钻孔系统的主要优点之一是灵活性。传统的CNC钻孔,通常只能在一个或两个平面上钻孔。然而,通过机器人,你几乎可以按你喜欢的任何方向进行钻孔。
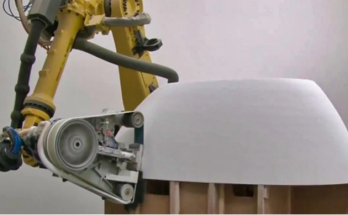
当你看到像几年前RoboDK用户、艺术家Robert Longo设计的Neoset设计作品这样的项目时,这种灵活性就体现的非常明显。这件艺术品由一个巨大的金属球体组成,该球体上钻有数千个孔洞,并在表面上以规则的间隔放置。
这种类型的项目你只能通过机器人钻孔来完成。人工钻孔任务量过大,且精度不一致。其他形式的钻孔自动化则无法从这么多不同的方向进行钻孔。
即使你的钻孔项目规模较小,这种灵活性也可能是难得的优势。
机器人真的可以钻孔吗? 关于刚度的问题
当大家首次研究机器人加工时,一个常见的问题就是没有足够的刚度。
传统的数控机床(CNC)具有极其坚硬的机械结构。数控机床的刚度通常超过50N/μm。这使得它们即使在加工硬材料时也能达到非常高的精度。

机器人的刚度确实比传统的数控机床低。工业机器人手臂的刚度通常只有1N/μm。这意味着它们承受的力比传统机器小50倍。
这在实操中意味着什么?
由于受力较大且材料坚硬,机器人的钻孔工具将比数控机床的钻孔工具偏转更多。在这种情况下,就意味着较低的准确性
低刚度是否是个问题?这取决于材料
然而,与数控机床相比,机器人的刚度较低并不一定是坏事。
即使是世界上最硬的数控机床也会在一定程度上发生偏转。问题的关键在于可以接受多少偏转。
选择机器人钻孔系统时,需要密切注意材料特性。通过机器人和工件材料的正确组合,你就可以确保机器人钻孔系统具有足够的刚度来完成所选任务。
最适合钻孔的机械臂是哪些?
你应该选择哪种工业机械臂进行钻孔?对你来说,最好的机器人是一个满足你所有性能标准,同时又不超出预算的机器人。
许多机器人模型适用于钻削某些材料。然而,其中只有一部分适合你使用的材料和任务的性能要求。
影响机器人钻孔的因素包括:
- 机器人的刚度,如上所述。
- 机器人振动处理
- 机器人加工的末端执行器
- 机器人的编程
评估所有这些因素的最快速、最简单的方法是询问你的机器人供应商或集成商。他们最熟悉相关的机器人模型,并知道哪些适合你的需要。
像刚度这样的特性通常不会列在工业机器人的数据表上。有多种分析方法可用于计算机器人手臂的刚度,但通常最好的办法是询问制造商。
如何部署机器人钻孔系统
机器人钻孔的部署过程与其他机器人加工项目非常相似。
你应该首先评估任务的需求,比较市场上的各种机器人。你可以使用我们的机器人库来缩小具有特定特征(例如重复性和有效载荷)的机器人的范围,但你需要向制造商询问有关刚度的详细信息。
当你决定使用你的机器人时,下一个选择是你的机器人末端执行器。为此,可以使用加工或钻孔主轴。
最后,你需要对机器人进行编程…
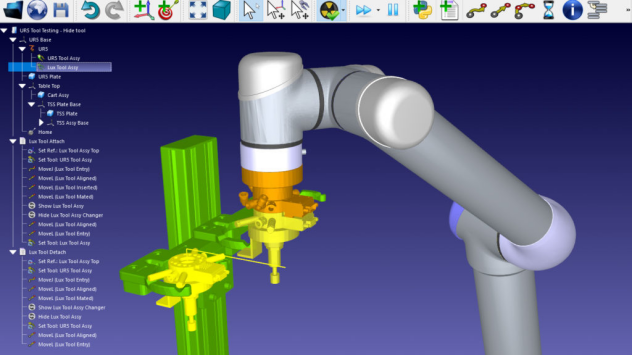
编程你的钻孔机器人
编程机器人钻孔系统时的一个常见问题是钻孔操作中大量的目标点。
与焊接不同,你不能只指示机器人沿直线移动。你必须将机器人引导到工件表面的每个钻孔。这会使编程变得非常困难。
通过使用包含目标点编程的编程工具,可以显著加快编程速度。
例如,RoboDK的目标点跟随向导允许你将一组钻孔点作为简单的文本文件加载。它还能够自动将曲线或直线路径转换为一组规则间距的孔进行钻孔。
你可以在我们的文档页面上找到如何使用此功能编程钻孔程序。