What defines a “robot” as we enter the second quarter of this century? Let’s look at the key characteristics that define modern industrial robots to help when you are comparing options for your automation project.
Robots have changed quite a lot over the past 70 years. Since the first industrial robots entered the automotive industry, the technology has grown gradually. With the growth of AI, the definition of a robot keeps changing.
However, the core characteristics of an industrial robot have remained pretty stable since the very beginning.
Here are the 10 key characteristics you need to know when you’re comparing robot models:
1. Degrees of Freedom (DoF)
Degrees of Freedom (DoF) is probably the most fundamental of all robot characteristics. It refers to how many independent axes the robot mechanism can move.
A standard 6 DoF robotic manipulator can independently move the position of its end effector in 6 dimensions:
- 3 translations (X, Y, and Z)
- 3 rotations, one around each of the X, Y, and Z axes
While 6 DoF arms are common, some robots (like SCARA robots) have fewer. Some robots (termed “redundant robots”) have extra DoF which helps avoid obstacles or robot singularities.
2. Payload Capacity
A robot’s payload is the maximum weight it can carry, including any tools and end effectors.
When you are designing a new robotic application, payload is a good starting point for comparing different models. Manufacturers always list a robot’s payload, so it is an easy way to quickly reduce the number of potential
You can use our robot comparator tool to see all robot models with the same payload capacity.
3. Repeatability and Accuracy
When comparing robot models, repeatability and accuracy should be top of your list.
These terms mean:
- Repeatability is how closely a robotic mechanism can return to the same position again and again. It is very common for robot manufacturers to list the repeatability.
- Accuracy is how closely the robot gets to the correct position. Manufacturers don’t usually list a robot’s accuracy because varies depending on calibration or programming.
You can improve your robot’s accuracy by properly calibrating your robot during programming.
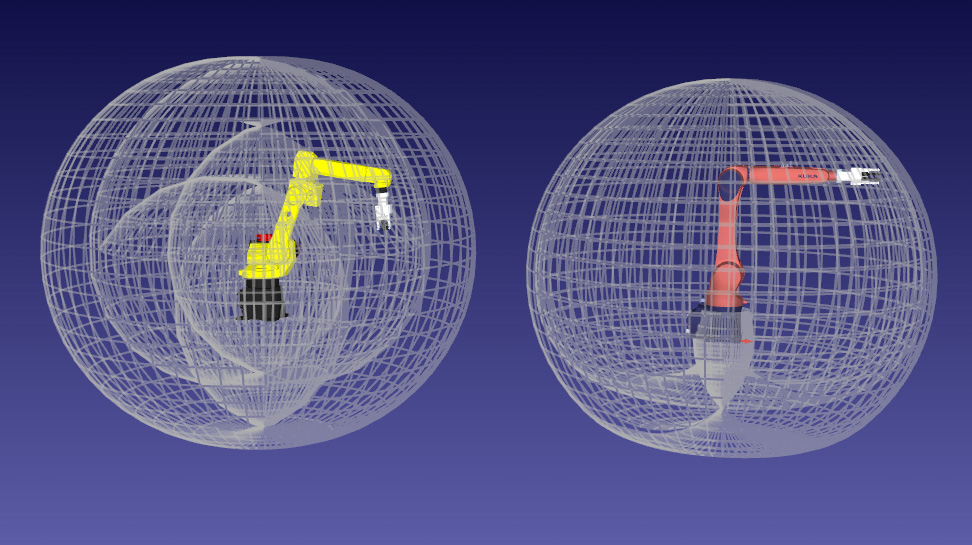
4. Reach and Workspace
Reach is the measure of how far a robot can extend from its base. This is a common characteristic listed on robot data sheets and gives you a rough idea of your available workspace for tasks.
A related characteristic is workspace, which shows the full volume of space a robot can cover. For example, a 6 DoF collaborative robot might have a spherical workspace, while a SCARA robot might have a cylindrical one.
Reachability analysis and workspace visualization are useful techniques for seeing a robot’s full workspace.
5. Speed and Cycle Time
There are various ways to consider the speed of a robot.
Two common characteristics are:
- Joint speed — This determines how fast each joint moves.
- End effector speed — This determines how fast the end effector can move in space along one of the robot’s DoF.
However, speed isn’t just about how fast a robot can move. It’s often more helpful to think about how quickly the robot can complete a particular task.
Cycle time is a useful measure of how long it takes for the robot to complete a single cycle of a particular task. You can measure cycle time for your task in your robot simulator.
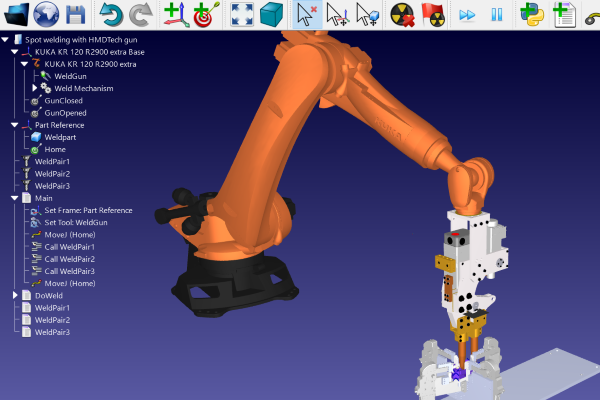
6. End Effector Compatibility
A robot is only as useful as its tool. This is referred to as the end effector and there are hundreds of possibilities including grippers, welders, paint sprayers, sensors, and more.
It’s important to check that your robot is compatible with any end effector that you might want to use.
With RoboDK, you can simulate different tools quickly in the simulator and even auto-calibrate tool centers for more precise operation. Check out our Ultimate Guide to Creating a Tool in RoboDK
7. Mounting Options
Industrial robots don’t have to sit on the floor or a table. Often, mounting the robot on a ceiling or wall is a better use of space.
For some robot models, you need to select a specific variant that is compatible with ceiling mounting. This is something you should check with the manufacturer.
Mounting the robot on an additional axis is also a powerful way to increase the workspace of your robotic system.
8. Robot Control and Software
How you program and control a robot is just as important as the robotic hardware.
With RoboDK’s vendor-agnostic programming software, you can quickly and easily program a huge number of robot models from many manufacturers.
Offline programming and simulation reduces many of the historical barriers to robot programming, no matter what robot brand you choose.

9. Safety and Collaboration
With the rise of collaborative robots (cobots) over the last 20 years, safety has become a vital characteristic for many companies.
Cobots are designed to operate safely around human workers. Through force sensing, ergonomic hardware design, and strict speed limits, they open up the possibility for collaborative tasks.
Robot safety is governed by international standards like ISO 10218-1 and ISO/TS 15066. And with tools like RoboDK, you can simulate safe zones and test programs virtually, reducing risks before putting the robot in production alongside people.
10. Cost and ROI
Over the past couple of decades, robot prices have dropped significantly, opening up the technology to many more people.
Even so, it’s important to work out the return on investment (ROI) for your robot system. This includes factors like total cost of ownership, installation, integration, programming cost, downtime, and training.
This is also why simulation and planning matter. If you design your cell, test your program, and optimize motion in a simulator like RoboDK before installation, you reduce financial risk and gain a quicker ROI.
Why Characteristics Matter: It’s a New Language
If you have never used robots before, all these terms might seem like learning a new language.
Robot characteristics are more than specs on a datasheet. They define what your robot can do—and how well it will do it.
When you understand key traits like DoF, repeatability, payload, and workspace, you can make sure you choose the right robot for your needs.
With RoboDK, you can explore real robot models, simulate real-world tasks, and make smart decisions—before anything hits the factory floor.
Which characteristic is most useful for your task? Tell us in the comments below or join the discussion on LinkedIn, Twitter, Facebook, Instagram, or in the RoboDK Forum.. Also, check out our extensive video collection and subscribe to the RoboDK YouTube Channel