
机器人钻孔最好的末端执行器是什么?
如果你在市场上找用于机器人钻孔的末端执行器的话?你可能很难找到合适的工具。 在购买工具时,钻孔机器人和其它用于钻孔的机器一样吗? 或者需要知道什么额外的属性吗? 机器人钻孔是一个相对简单的任务。只需要一点基础知识就可以找到合适的末端执行器。
继续阅读工业机器人应用从未如此简单
如果你在市场上找用于机器人钻孔的末端执行器的话?你可能很难找到合适的工具。 在购买工具时,钻孔机器人和其它用于钻孔的机器一样吗? 或者需要知道什么额外的属性吗? 机器人钻孔是一个相对简单的任务。只需要一点基础知识就可以找到合适的末端执行器。
继续阅读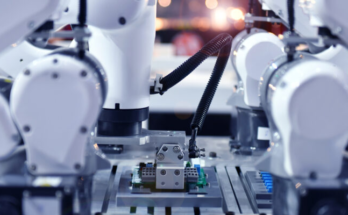
想不想提高整个电子制造过程的生产力? 电子产品测试是许多公司的瓶颈。测试是确保产品质量的重要步骤,但也需要大量时间。作为一项非增值任务,这可能使其难以改进。 许多电子制造商正面临着如何实现高效测试的挑战。 正如EETimes几年前报道的那样,“除非测试的瓶颈得到解决,否则未来电子系统的成本将会飙升。”虽然这篇文章专门提到了片上系统(SoC)验证,但这个瓶颈仍然存在于整个电子行业。
继续阅读
整个汽车行业都迫切需要改进电动汽车制造流程。 随着对电动汽车的需求呈指数级增长,制造商们发现自己处于这样一种境地:工艺改进不仅仅是“好就行了”,因此他们十分迫切。 《Nature》近期的文章指出,电池和汽车制造商已经花费数十亿美元来降低制造成本。 如果你是一位汽车制造商,你不可能不在生产过程中加入自动化机器人。因为你的竞争者已经开始这么做了!
继续阅读
RoboDK发布了新的码垛插件,用于对码垛应用程序进行直观编程且几乎与所有的机器人品牌兼容。该插件简洁了通常繁琐的编程任务,提高了部署效率。 码垛是机器人自动化越来越普遍的应用。对于人类工人来说,将集装箱吊到托盘上的工作很乏味,由于其重复性,增加了肌肉骨骼损伤的风险
继续阅读
如果你在考虑一款新的机器人编程工具。一款可以保证简化编程、提高效率的工具。 你要如何确定哪款工具最适合你的业务重点呢? 投资新的机器人编程工具有意义吗? 或者,你应该像以前那样继续编程吗? 你可能已经明白将机器人添加到业务中的好处。如果你已经使用机器人一段时间了,你可能已经看到了它们对你重点业务的影响。
继续阅读
拾取和放置编程是机器人技术中的一项基本技能。但是,如何为你的工业机器人快速、轻松地创建此类程序呢? 通过RoboDK简便的编程界面,你在几分钟内就可以创建一个拾取和放置程序。 下面将讲述如何开始简单的拾取和放置编程。
继续阅读
RoboDK有多种版本,包括电脑版、网页版和移动版。问题是,哪一个最适合你的需求?RoboDK拥有广泛的产品系列。与同类产品不同,RoboDK的不同版本不按应用领域分组。 RoboDK的所有版本都提供相同的机器人编程内容,适用于所有机器人应用。您还可以通过RoboDK许可证来使用所有版本。 不同的版本为不同的设备提供支持。
继续阅读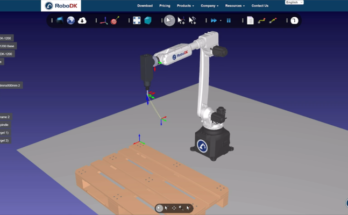
机器人编程软件RoboDK近日发布了一个新的网络版本。这个简化版无需许可证,为销售代表、机器人新用户和教育提供了一个便携的、简化的界面。 创建令人信服的机器人解决方案销售演示并非易事。机器人经销商通常通过模拟来让客户理解他们的解决方案,但是这些模拟并不方便。
继续阅读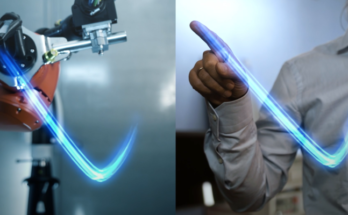
它们都是一种比传统编程更加直观的编程方式。但是,TwinTrack和手动引导有什么区别? 我们发布了TwinTrack——我们为工业机器人提供的新型编程方式。它让你只需用激光跟踪器的手持式探头追踪你想要的路径,就可以为你的机器人编程,无需常规的编程。
继续阅读
你可能没有注意到,我们一直在不断地改进RoboDK。我们团队的工作就是让你的机器人编程体验更好、更轻松。 自2022年初,我们已经在RoboDK软件中推出了许多更新,可能你都没有注意到。
继续阅读
自动化解决方案提供商Wilder Systems为飞机开发了一种独特的机器人“免下车”清洗系统。该系统取代了传统的人工清洗并将任务时间节约了95%,通过使用 RoboDK编程软件,航空航天制造商即使在没有操作机器人经验的情况下也可以对任务进行编程。
继续阅读
这个月,RoboDK发布了TwinTrack模块,这是一个高效又便捷的编程工具,让用户可以通过手持式探针定义所需实现的机器人运动,快速且准确地为工业机器人编程。
继续阅读
一个多月以前,我们介绍了如何选购机器人辅助定位器。那么,如果你现在正试图使用机器人定位器来扩展你的机器人性能,最好的编程方式是什么呢?有很复杂的办法,也有简单的方案。
继续阅读
每个机器人编程人员都有自己的编程偏好,今天我们介绍自定义RoboDK界面的10种方法,以方便用户使用。
继续阅读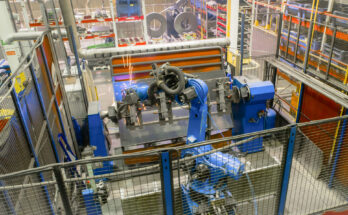
你是否在考虑购置一个机器人辅助定位器?现在市面上有各种各样的定位器可供选择。它们的轴心、负载量和配置各异。那么问题就在于,我们该如何选择最符合我们需要的定位器呢?
继续阅读